@Akim, please find below 
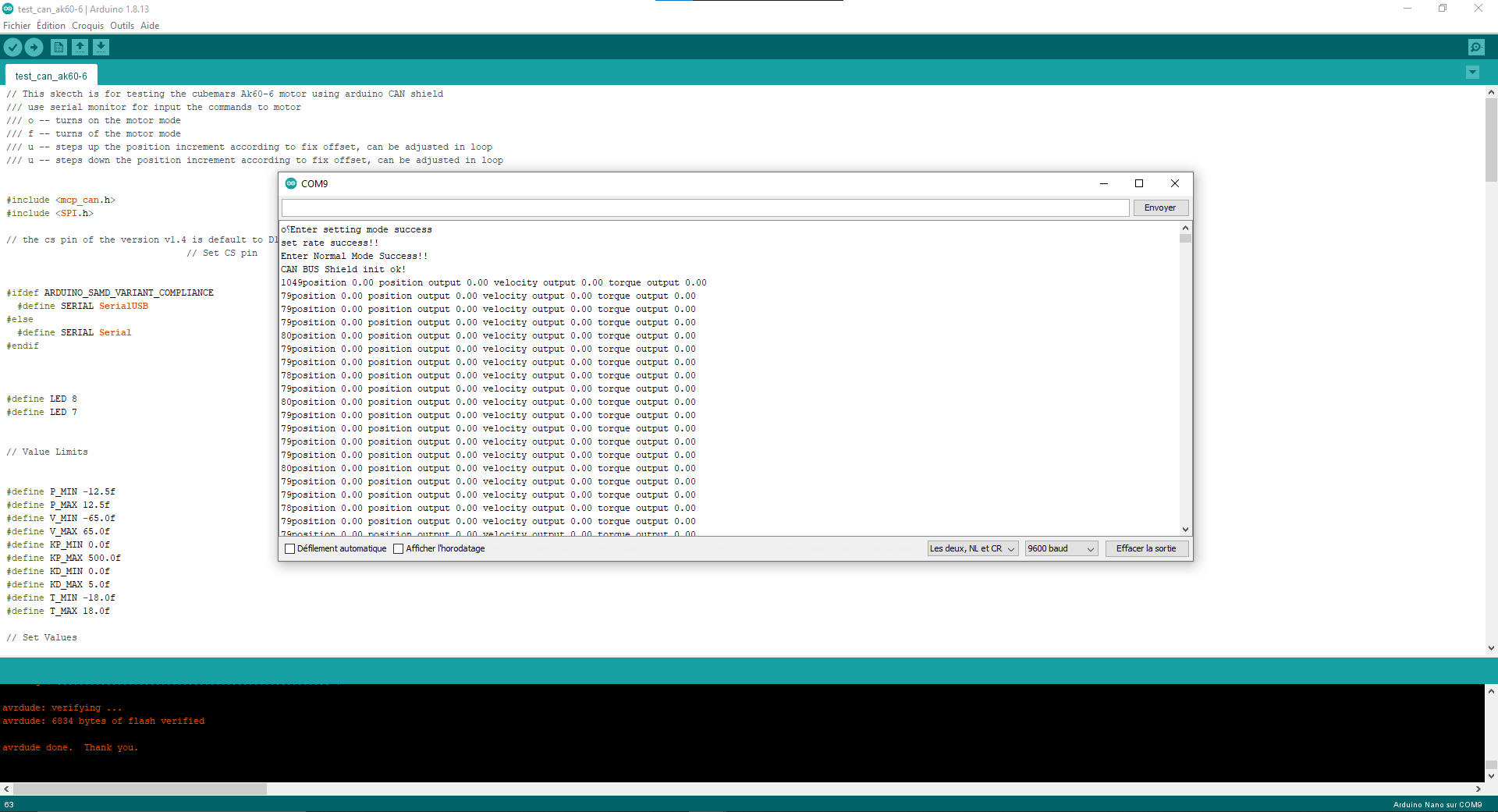
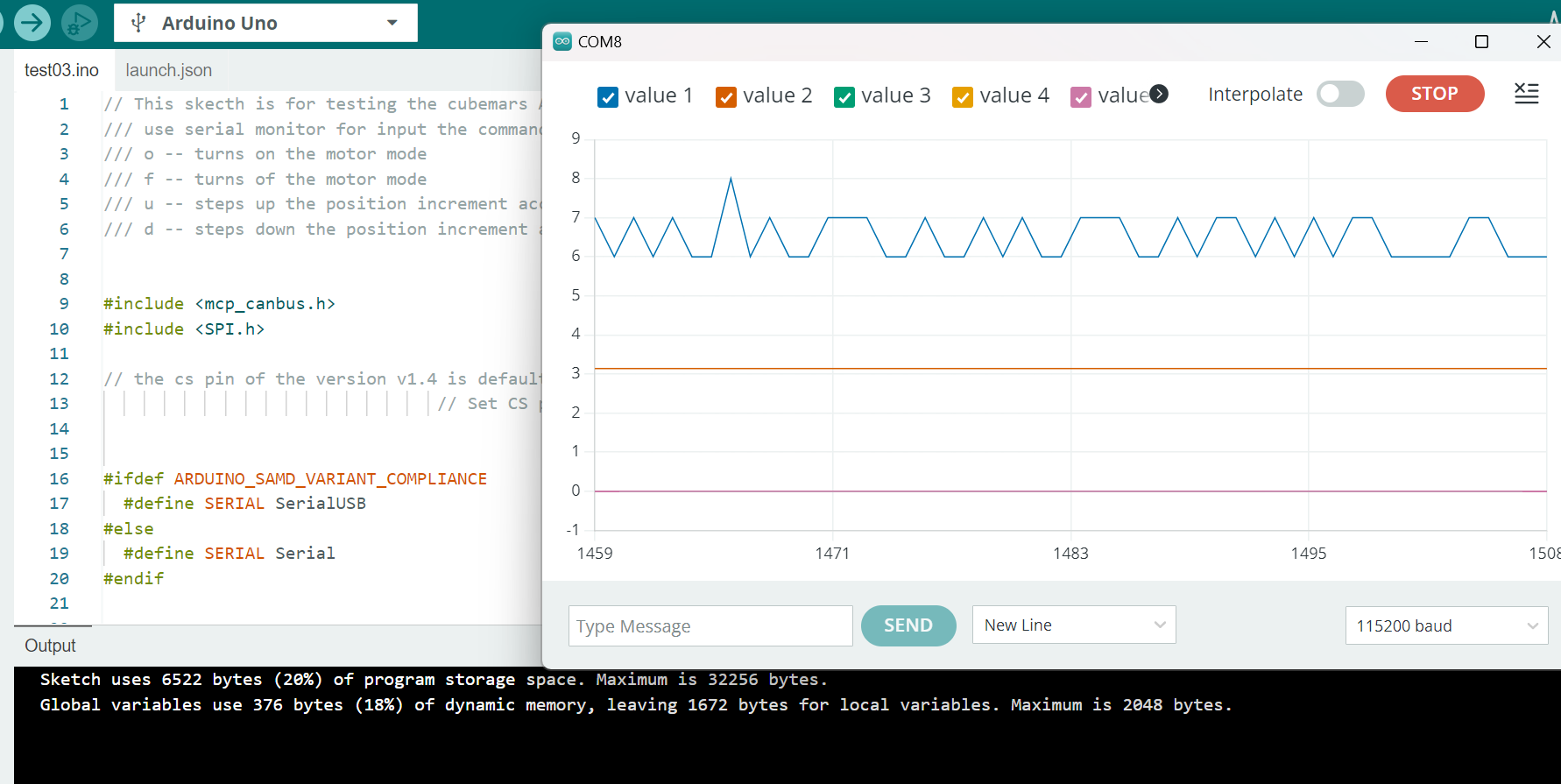
// This skecth is for testing the cubemars Ak60-6 motor using arduino CAN shield
/// use serial monitor for input the commands to motor
/// o -- turns on the motor mode
/// f -- turns of the motor mode
/// u -- steps up the position increment according to fix offset, can be adjusted in loop
/// u -- steps down the position increment according to fix offset, can be adjusted in loop
#include <mcp_can.h>
#include <SPI.h>
// the cs pin of the version v1.4 is default to D10
// Set CS pin
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SERIAL SerialUSB
#else
#define SERIAL Serial
#endif
#define LED 8
#define LED 7
// Value Limits
#define P_MIN -12.5f
#define P_MAX 12.5f
#define V_MIN -65.0f
#define V_MAX 65.0f
#define KP_MIN 0.0f
#define KP_MAX 500.0f
#define KD_MIN 0.0f
#define KD_MAX 5.0f
#define T_MIN -18.0f
#define T_MAX 18.0f
// Set Values
float p_in= 0.0f;
float v_in=0.0f;
float kp_in=20.0f;
float kd_in=1.0f;
float t_in=0.0f;
//measured values - responses from the motor
float p_out = 0.0f; // actual position
float v_out = 0.0f; // actual velocity
float t_out = 0.0f; // actual torque
const int SPI_CS_PIN =10;
MCP_CAN CAN(SPI_CS_PIN); //Set CS pin
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
delay(1000);
while(CAN_OK !=CAN.begin(CAN_1000KBPS))
{
Serial.println("CAN BUS Shield init fail");
Serial.println("Init CAN BUS Shield again");
delay(1000);
}
Serial.println("CAN BUS Shield init ok!");
}
long previousMillis =0;
boolean newData = false;
void loop() {
char rc;
float p_step=0.1;
//delay(200);
while (Serial.available() > 0 && newData == false) {
rc = Serial.read();
Serial.println(rc);
if(rc=='s'){
Serial.println("True");
}
if (rc=='u')
{
p_in=p_in+p_step;
}
if (rc=='d')
{
p_in=p_in-p_step;
}
p_in= constrain(p_in,P_MIN, P_MAX);
if(rc=='o')
{
EnterMotorMode();
}
if(rc=='f')
{
ExitMotorMode();
}
// send CAN
pack_cmd();
}
// receive CAN
if(CAN_MSGAVAIL == CAN.checkReceive()) // check if data coming
{
unpack_reply();
}
Serial.print(millis()-previousMillis);
previousMillis=millis();
Serial.print("position ");
Serial.print(p_in);
Serial.print(" ");
Serial.print("position output ");
Serial.print(p_out);
Serial.print(" ");
Serial.print("velocity output ");
Serial.print(v_out);
Serial.print(" ");
Serial.print("torque output ");
Serial.println(t_out);
}
void EnterMotorMode(){
byte buf[8];
buf[0]=0xFF;
buf[1]=0xFF;
buf[2]=0xFF;
buf[3]=0xFF;
buf[4]=0xFF;
buf[5]=0xFF;
buf[6]=0xFF;
buf[7]=0xFC;
CAN.sendMsgBuf(0x01,0,8, buf);
}
void ExitMotorMode(){
byte buf[8];
buf[0]=0xFF;
buf[1]=0xFF;
buf[2]=0xFF;
buf[3]=0xFF;
buf[4]=0xFF;
buf[5]=0xFF;
buf[6]=0xFF;
buf[7]=0xFD;
CAN.sendMsgBuf(0x01,0,8, buf);
}
void Zero(){
byte buf[8];
buf[0]=0xFF;
buf[1]=0xFF;
buf[2]=0xFF;
buf[3]=0xFF;
buf[4]=0xFF;
buf[5]=0xFF;
buf[6]=0xFF;
buf[7]=0xFE;
CAN.sendMsgBuf(0x01,0,8, buf);
}
void pack_cmd(){
byte buf[8];
// limit data to be within bounds ///
float p_des= constrain(p_in,P_MIN,P_MAX);
float v_des= constrain(v_in,V_MIN,V_MAX);
float kp= constrain(kp_in,KP_MIN,KP_MAX);
float kd= constrain(kd_in,KD_MIN,KD_MAX);
float t_ff= constrain(t_in,T_MIN,T_MAX);
unsigned int p_int = float_to_uint(p_des,P_MIN,P_MAX,16);
unsigned int v_int = float_to_uint(v_des,V_MIN,V_MAX,12);
unsigned int kp_int = float_to_uint(kp,KP_MIN,KP_MAX,12);
unsigned int kd_int = float_to_uint(kd,KD_MIN,KD_MAX,12);
unsigned int t_int = float_to_uint(t_ff,T_MIN,T_MAX,12);
//pack ints into can buffer ///
buf[0]=p_int >>8;
buf[1]=p_int & 0xFF;
buf[2]=v_int >> 4;
buf[3]=((v_int&0xF)<< 4)| (kp_int >>8);
buf[4]= kp_int &0xFF;
buf[5]= kd_int >>4;
buf[6]= ((kd_int&0xF)<< 4)| (t_int >>8);
buf[7]= t_int &0xFF;
CAN.sendMsgBuf(0x01,0,8,buf);
}
void unpack_reply(){
byte len=0;
byte buf[8];
CAN.readMsgBuf(&len,buf);
unsigned long canId=CAN.getCanId();
///unpack ints from can buffer///
unsigned int id = buf[0];
unsigned int p_int = (buf[1]<<8)| buf[2];
unsigned int v_int =(buf[3]<<4)|(buf[4]>>4);
unsigned int i_int = ((buf[4]&0xF )<<8)| buf[5];
/// convert uints to floats ///
p_out = uint_to_float(p_int,P_MIN,P_MAX, 16);
v_out = uint_to_float(v_int,V_MIN,V_MAX, 12);
p_out = uint_to_float(i_int,-T_MIN,T_MAX, 12);
}
unsigned int float_to_uint(float x, float x_min, float x_max, float bits){
//convert a float to an unsigned int, given range and number of bits ///
float span = x_max-x_min;
float offset = x_min;
unsigned int pgg=0;
if(bits ==12){
pgg= (unsigned int)((x-offset)*4095.0/span);
}
if(bits ==16){
pgg= (unsigned int)((x-offset)*65535.0/span);
}
return pgg;
}
float uint_to_float(unsigned int x_int, float x_min,float x_max, int bits){
/// converts unsined int to float, given range and numbers of bits///
float span = x_max - x_min;
float offset = x_min;
float pgg=0;
if (bits ==12){
pgg=((float)x_int)*span/4095.0 + offset;
}
if (bits ==16){
pgg=((float)x_int)*span/65535.0 + offset;
}
return pgg;
}