Dear Mybotshop,
I have purchased a total of 21 AK70-10s and one AK80-9 for robotics projects over the last months.
The motors have proven nominal when we do basic setup, but some of the motors develop a problem with the CAN bus. Similar to this issue: Issues with CubeMars AK10-9 V2.0 motors: Cannot run/reset the motors
Summary of the situation:
-
We get the motors(7 AK70-10 V1.0 with driver board 2.0. and 15 AK70-10 V2.1 with driver board)
-
Start using some of the motors for a robotic leg.
-
Start noticing that some of the motors don’t respond to the CAN signal and won’t enter motor mode.
-
Then, for 2-3 of the motors, they have been set to a lower current limit (testing current limit set to 5 out of 60) while doing initial testing, suddenly they are either reset to all values for the motor (motor id, baud rate, current limit) is set to 0 (Zero). Or they get reset to their default CAN id (1) and default current limit (60).
-
Then, when using these motors, later on, the CAN stops working, and the motor cannot enter motormode. Neither with the R-link V2 nor with the Arduino with Seed studio or Sparkfun CAN bus shield. I tried with two different R-link V2 and one R-link V1, but none of them worked on these motors.
-
Then we started noticing that some of the motors we had as backups(not unrapped from the plastic or removed from the box) also had a CAN problem shortly after starting to test them, even most of them without a load other than the motor itself or with using anything other than the R-link V2.
-
For all the motors with the CAN problem, they are mechanically ok as they turn on using UART and can run the Calibration with the R-link debug mode. Most of the motors with Firmware 1.1 can use servomode also.
-
I have confirmed that the setup, except for the motor, works by testing it on several other motors that do not have the CAN problem, and they turn on using both the R-link V2 and the Arduino setup.
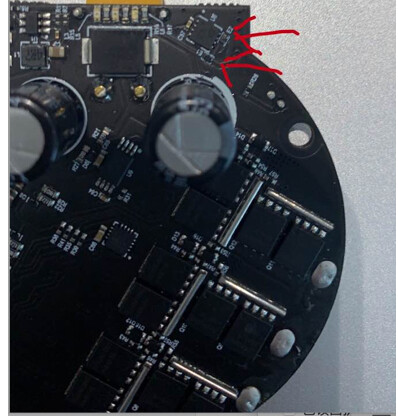
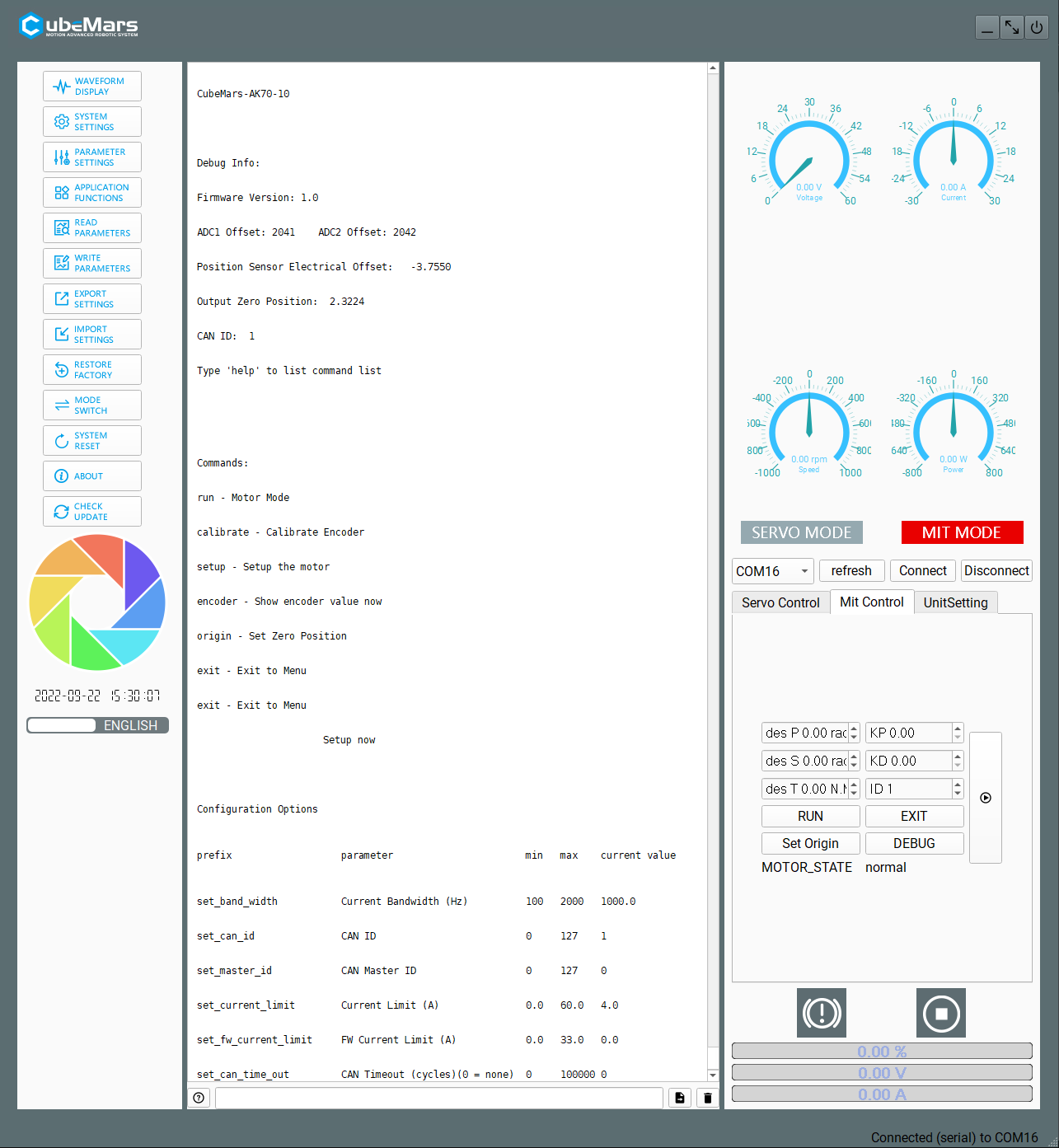
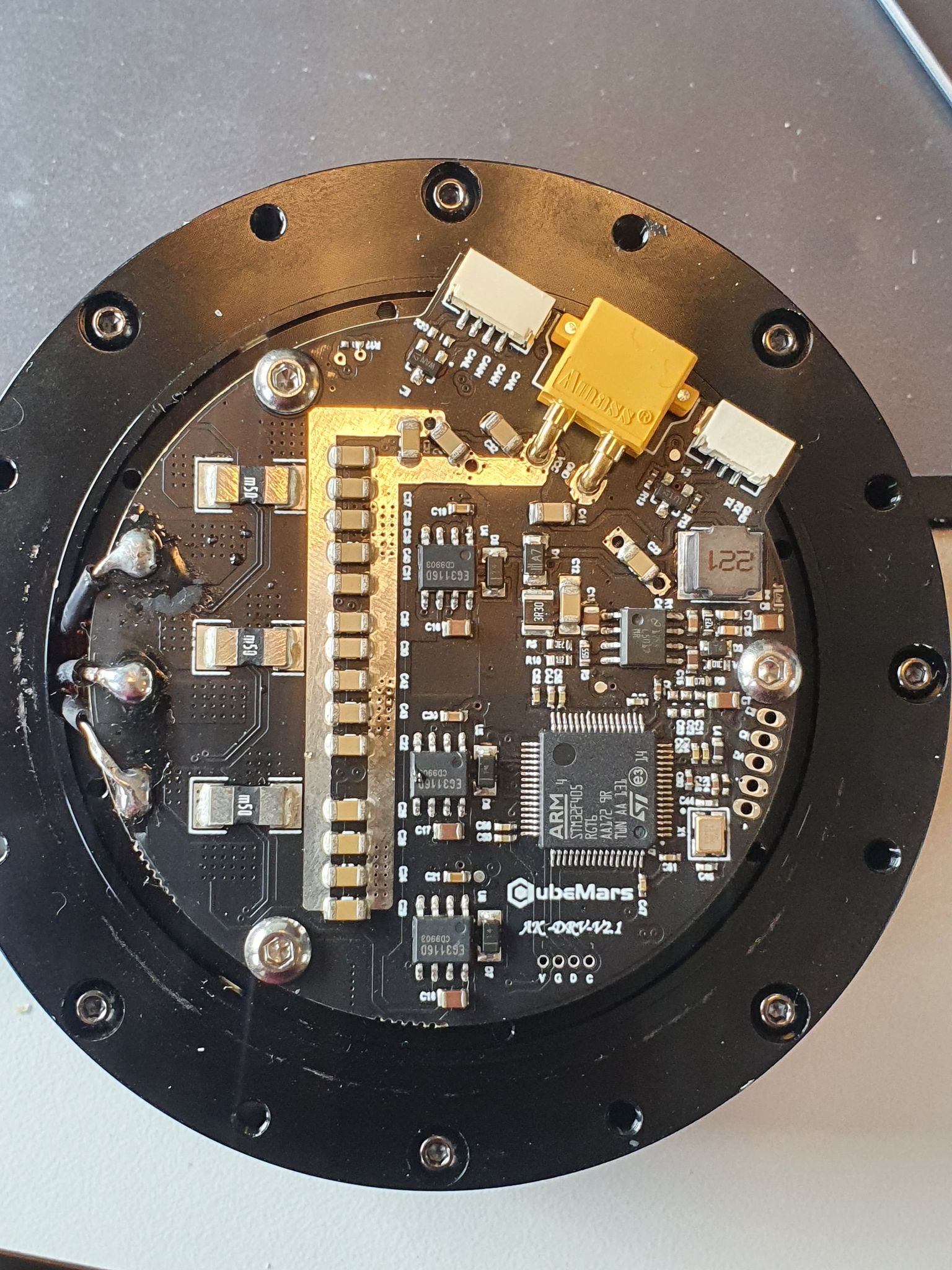
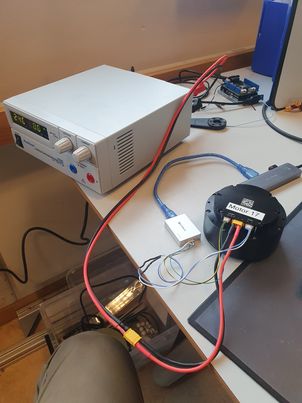
I have attached images of the motor driver boards and the R-link setup together with screenshots of the R-link user interface.
I have changed the CAN wires on the R-link as they broke once on each R-link V2. I have also checked every wire and power cable to check that they were not the problem. I tried with both battery power and a PeackTeck laboratory power supply.
I also tried the factory reset in the Cubemars software.
I tried to run the fault command that shows up in debug mode to read the error message, it did nothing.
I tried to correlate if the lights (power =Blue, green=communication, red=error) correlated with the problem, about 60% of the motors had the red error light, but not all of the motors that were not functioning had the error light or the blue light for that matter even though they rotated the output shat when using the UART calibration function.




So to summarise, 4 out of the 7 AK70-10 V1.1 has a problem with CAN communication, the same problem goes for at least 6 of the newer AK70-10 V2.1.
I would love to get some help with this. Looking forward to hearing from you soon!
Best regards
Jørgen