I just follow exactly what you tell me to do, so I did not use the release flags.
With that, I don’t know what’s going wrong, but it just won’t build properly.

I just follow exactly what you tell me to do, so I did not use the release flags.
With that, I don’t know what’s going wrong, but it just won’t build properly.
Dear @kgalama,
Have you done
sudo apt-get install ros-humble-clearpath* -y
Clearpath have updated their repos and it might be some weird conflict. Please run the above command and then add COLCON_IGNORE to all the clearpath folders in your pcs ros2_ws (not on the robot) e.g.
cd ros2_ws/src/third_party/clearpath
touch COLCON_IGNORE
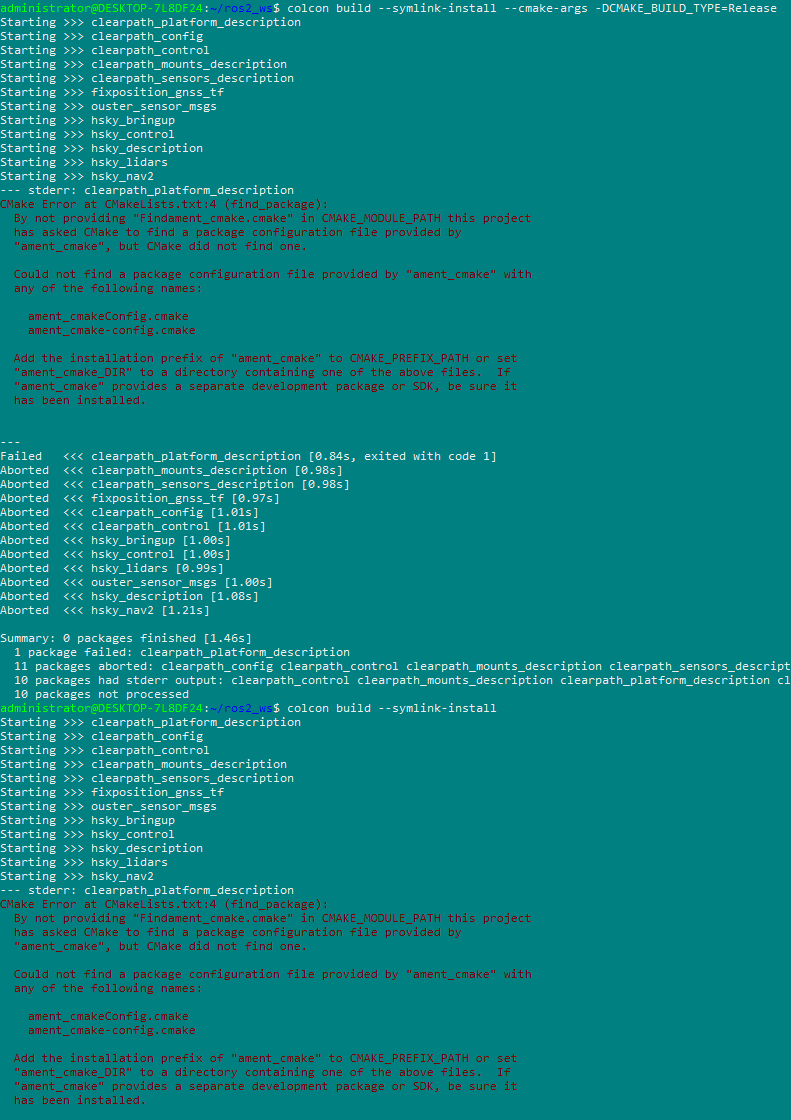
cd && cd ros2_ws
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
yes, i have.
Depending on how the script runs when i do colcon build, it keeps breaking on the following;
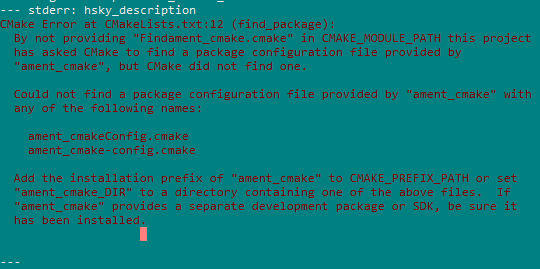
Either on “hsky_description”, but i’ve also had the same error on “hsky_nav2”, now on “ouster_sensor_msgs”.
What am I missing?
The environment might not be sourced.
source /opt/ros/humble/setup.bash
also remove build folders
cd ros2_ws
rm -rf build install log