It seems that when the password was changed, it was not performed correctly for system-wide change only allowing access via the terminal but not for GUI.
I would advise taking the issue to the Ubuntu forums as we are unfamiliar with this issue. However, for resolution access to GUI env is not required.
I called the ros2 service call you told me to do, but now that there’s no display to connect to it wont launch rviz.
I’ll check on the ubuntu forums if they have any idea, and will report back when i can finally log in to the desktop environment again to check rviz.
yeah I tried setting up the ros / multi computer setup on my laptop instead, but for some reason i couldn’t connect to the husky, I was connected through wifi though, we’ve set up the access point of the husky to forward to ethernet, so I assumed it would’ve just worked.
I managed to just run sudo sharex from the terminal which got me into the GUI again, and when running rviz with ros2 launch hsky_viz view_robot.launch.py, it does not rotate on it’s own spot anymore like before in the video, so I guess we’re a step closer to getting a proper map?
In ROS2 it already has a multimachine setup. Please note that certain routers allow ROS2 communications and some don’t, for those that don’t work require the network administrators to configure the router to make it work.
Please use a direct ethernet connection to the Husky.
Please see over 2 minutes if the husky is moving or not in orientation in the rviz2.
It seems to not be moving, and the map that I made seems pretty accurate too, no weird rotating glitches like before.
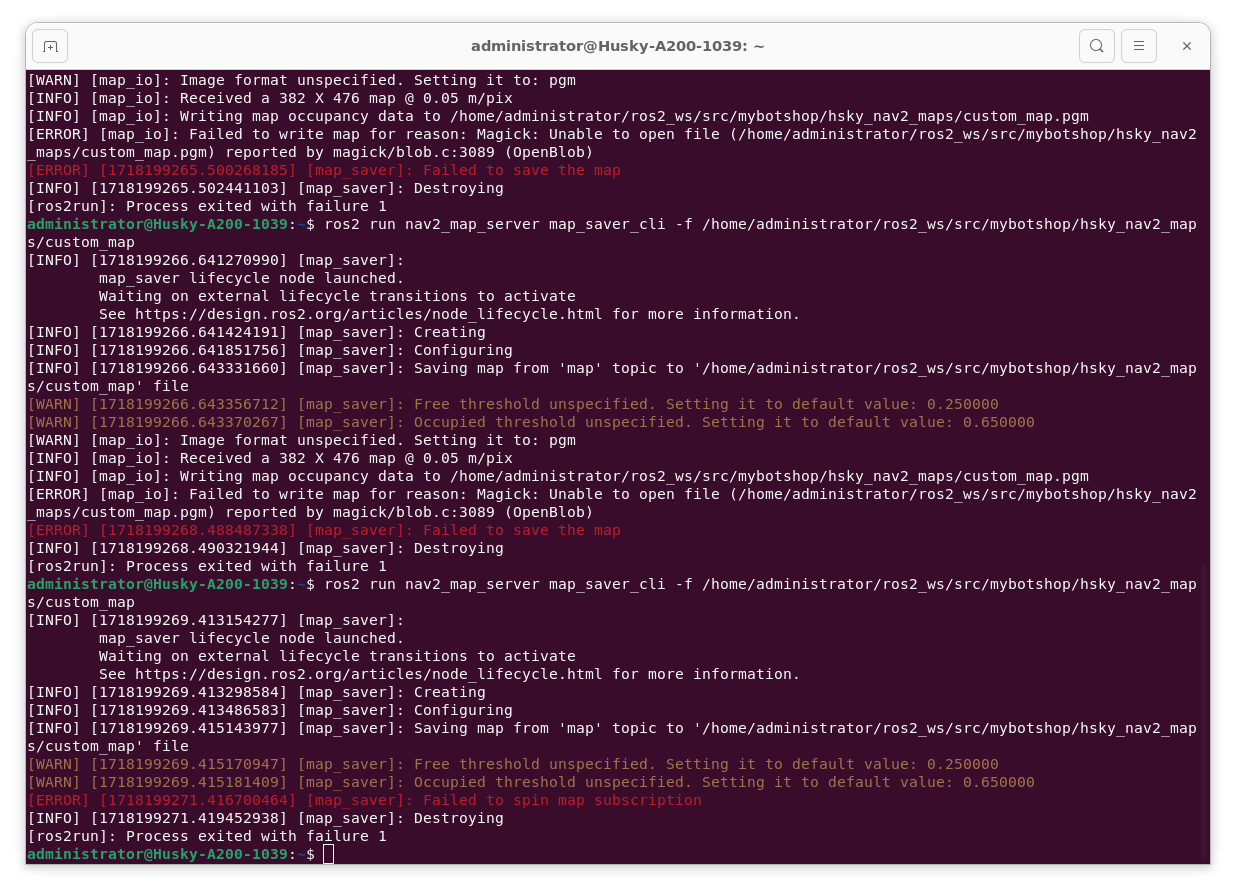
Now when I try to save the map using ros2 run nav2_map_server map_saver_cli -f /home/administrator/ros2_ws/src/mybotshop/hsky_nav2/maps/hms, it returns failed to spin map subscription, destroying, process exited with failure 1.
Anything i’m doing wrong in this case?
I’m connecting directly to the wifi access point that we configured through fixposition, shouldn’t that be able to work?
This command has to be run on the robot terminal and not on your local PC. Subscription failure usually occurs when it is not in the same computer. Also try running the command again but restarting SLAM before you use it.
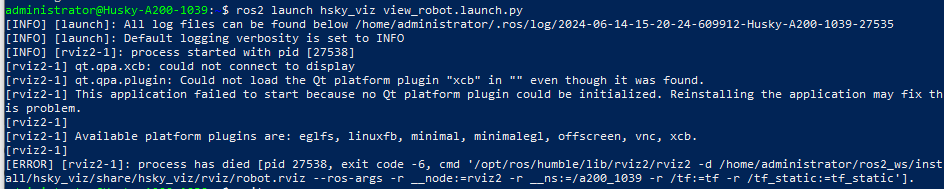
Could you guide me in trying to run RViz and send commands to the robot on the offboard computer over wifi?
I can succesfully ssh into husky pc from my laptop, I now just need to start RViz, to which I get told that there’s no display connected, which makes sense from the terminal i suppose;
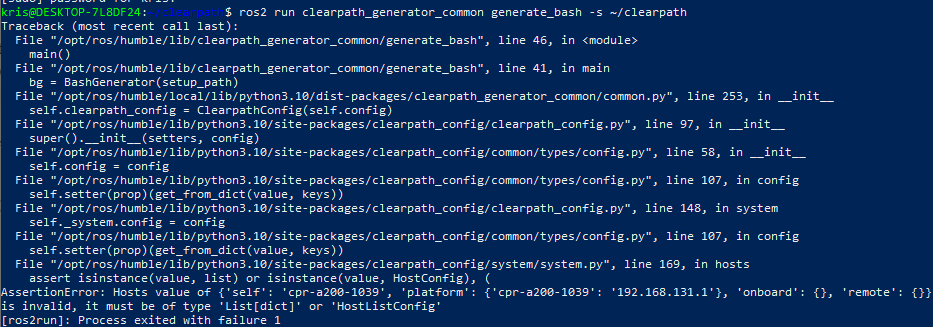
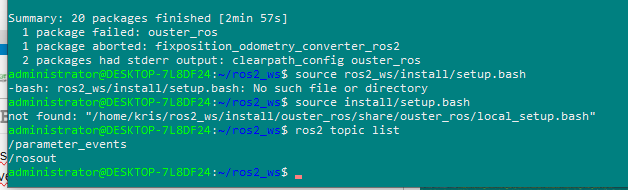
I’ve installed ROS2 Humble on my Linux subsystem (running a windows10 laptop), but whenever I try to run ros2 run clearpath_generator_common generate_bash -s ~/clearpath (after copying the a200.yaml to the offboard computer), I get hit with;
Unfortunately, there are no videos available at the moment.
If you want to run RViz2 on your PC. Then the procedure is simple.
For other users this is applicable for Husky’s provided by us.
Clone the ros2_ws from the husky to your PC with Ubuntu 22 and ROS2 Humble
Install the dependencies that should be in the mybotshop folder within the ros2_ws
Install clearpath packages via sudo apt-get install ros-humble-clearpath*
Source the ros2_ws
Ensure you are connected to the Husky and can see the topics and launch ros2 launch hsky_viz view_robot.launch.py (Be sure to first try with LAN connected to the PC directly without a switch or router in between then try with the WiFi )
Because when i then check for the topic list, i only see the listed 2.
I’m assuming it’s my network connection not being set-up properly (this laptop also doesn’t have an ethernet port anymore), so I’ll have another look at that one tomorrow, but so far it seems like we’re making some headway at least. Any other ideas in the meantime?
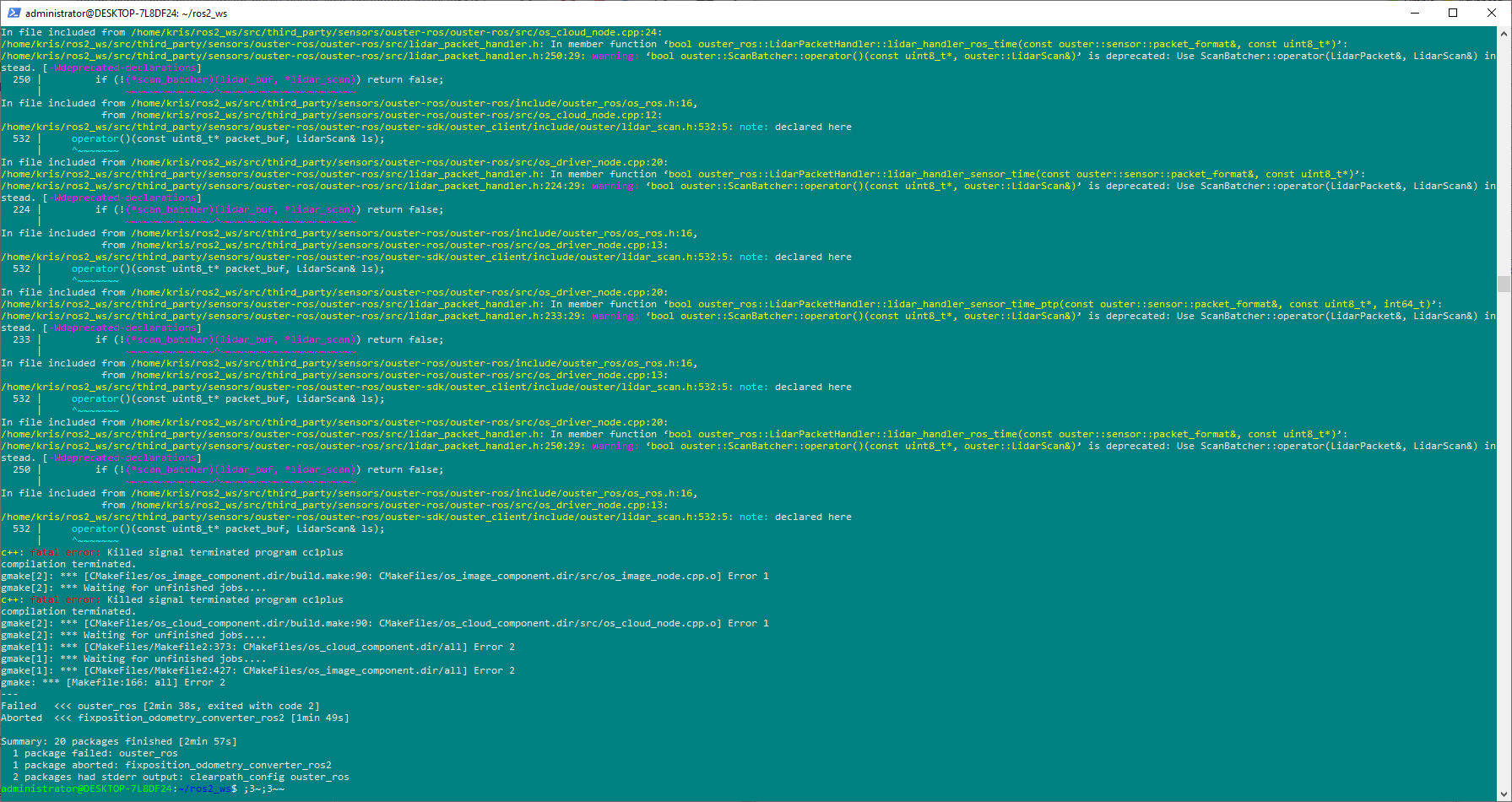
Regardless, you can put COLCON_IGNORE on the ouster package as it is not needed for visualization and so is the case for most of the other third-party packages as well!