We have noticed with the ZED2i that the IMU data is not correct. The camera is registering motion even though the camera is not moving. We have checked it with our ZED2. Everything is fine with it.
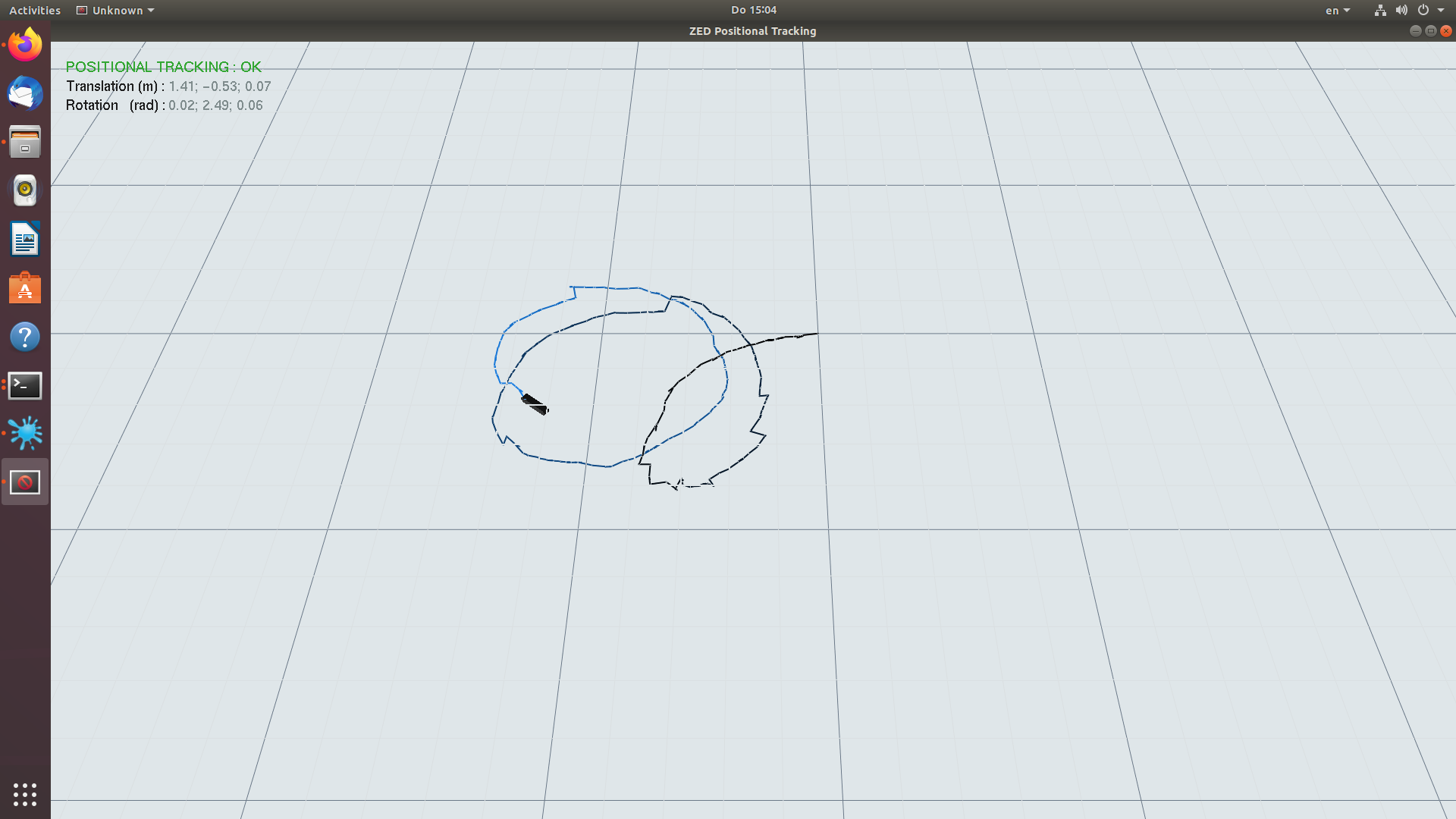
The camera keeps registering that it is moving in the plane with a lot of angular acceleration. which causes any generated map to be false.
To reproduce the problem:
This can be simply done by accessing the ZED SDK Examples and accessing the example for:
$./ZED_Positional_Tracking
The problem is also very obvious when trying to map the surroundings using the camera with RTAB-map
This also can be done by running opening a new terminal and running:
the IMU probably lost calibration (maybe because of a shock).
The calibration can be recovered by putting the camera on a stable surface (better the floor than a table/desk) and starting the ZED Calibration tool from the command line with the option --calib-imu .
You can read more on our forum:
I ran the calibration tool with the specified parameters, did not solve the issue, it still rotates, also the camera is brand new so it did not have any kind of shocks.
I think we need to replace it because from what I am seeing looks like it is faulty hardware.
Hi Mohamed! I am having the same issue with my new ZED camera. It hasn’t been dropped or shaken, but it’s rotating. I extracted the IMU from YOLO detections, and the transformations are incorrect. Did you manage to solve the issue?