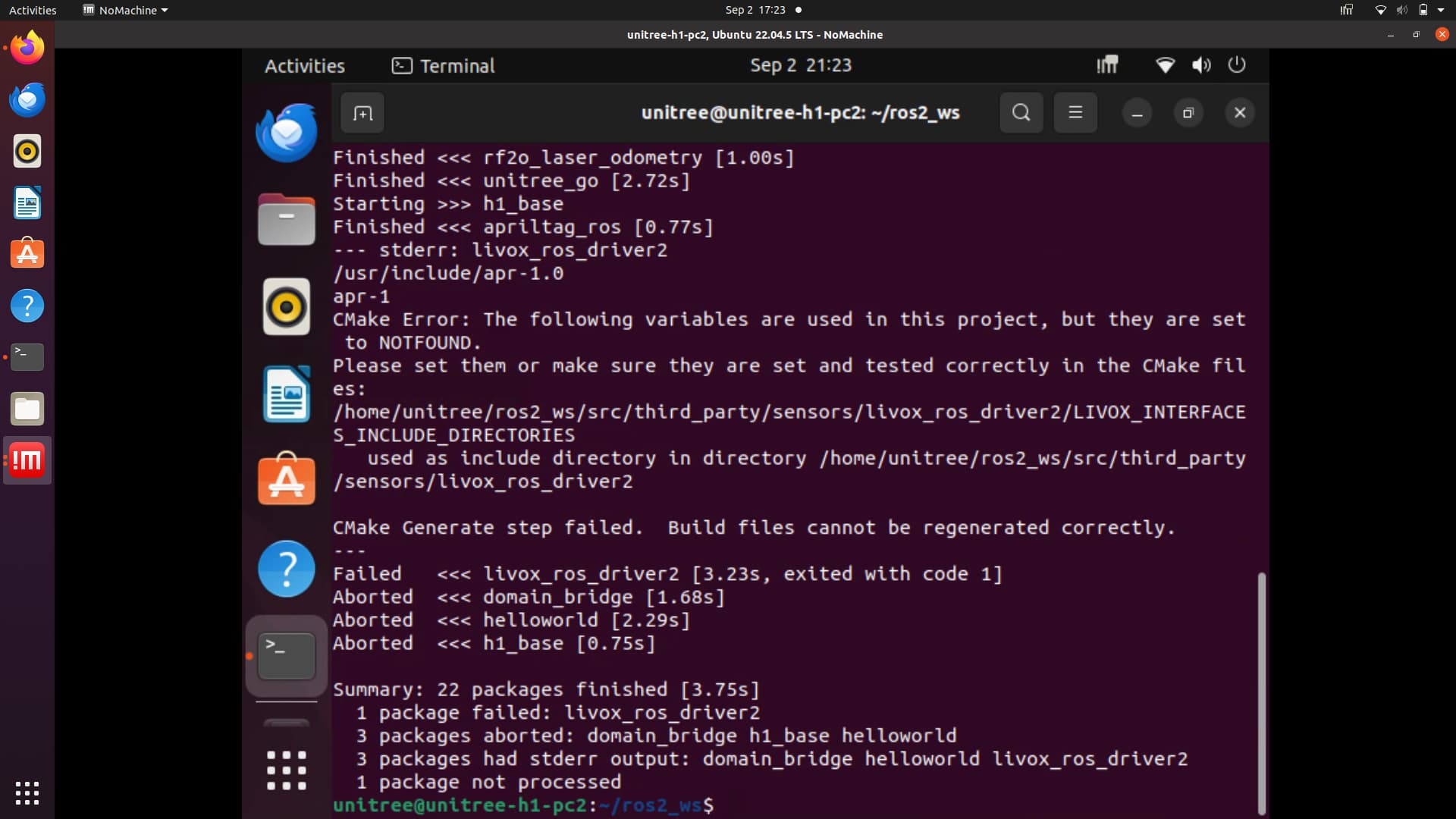
I’m trying to use the h1_bringup package for the Unitree H1 robot, but I’m running into build issues related to missing dependencies. Here’s the full sequence:
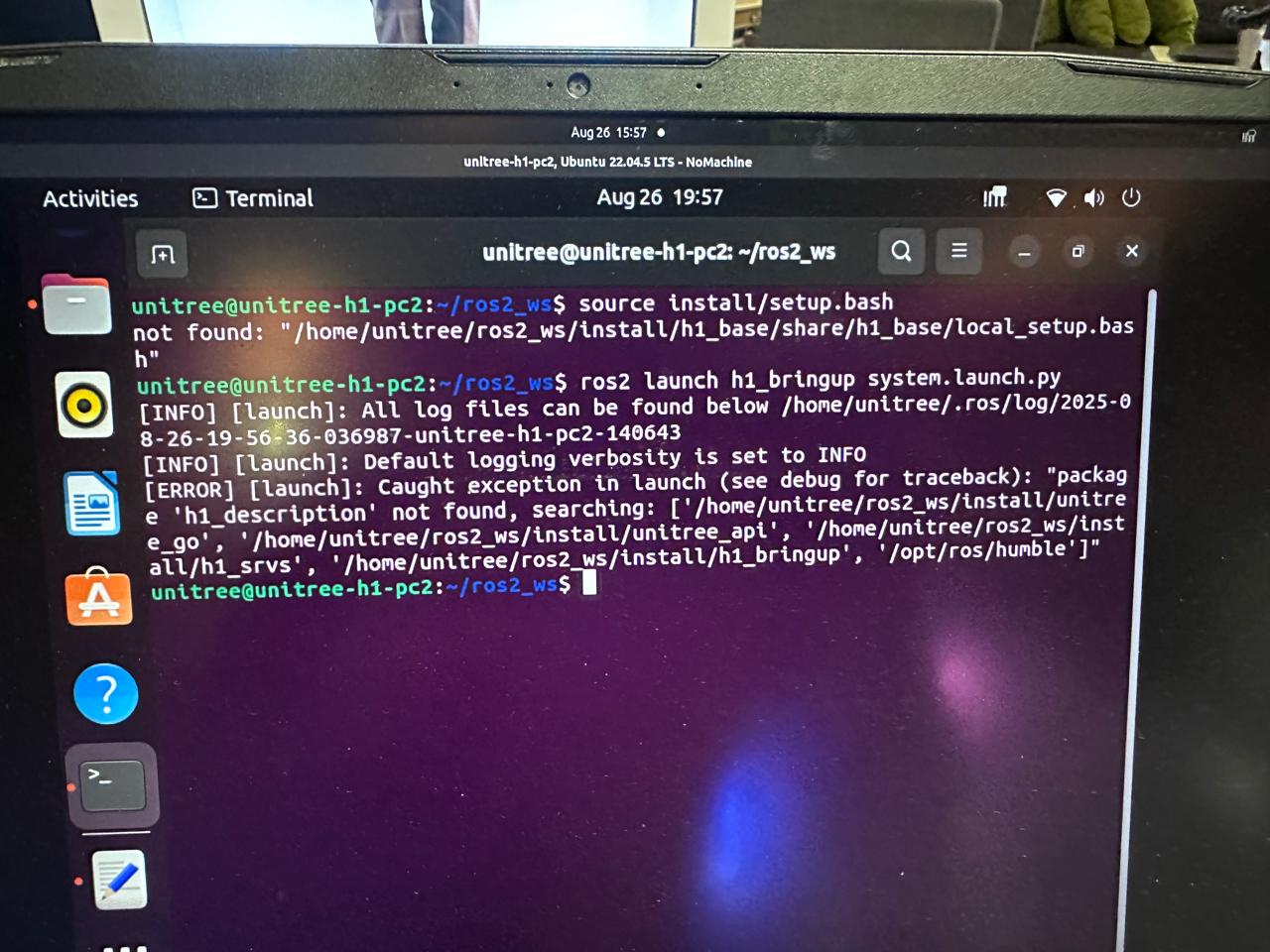
When I try to build h1_bringup, I get an error saying:
h1_description not found
So I tried building h1_description, but that gives me another error saying:
h1_base not found
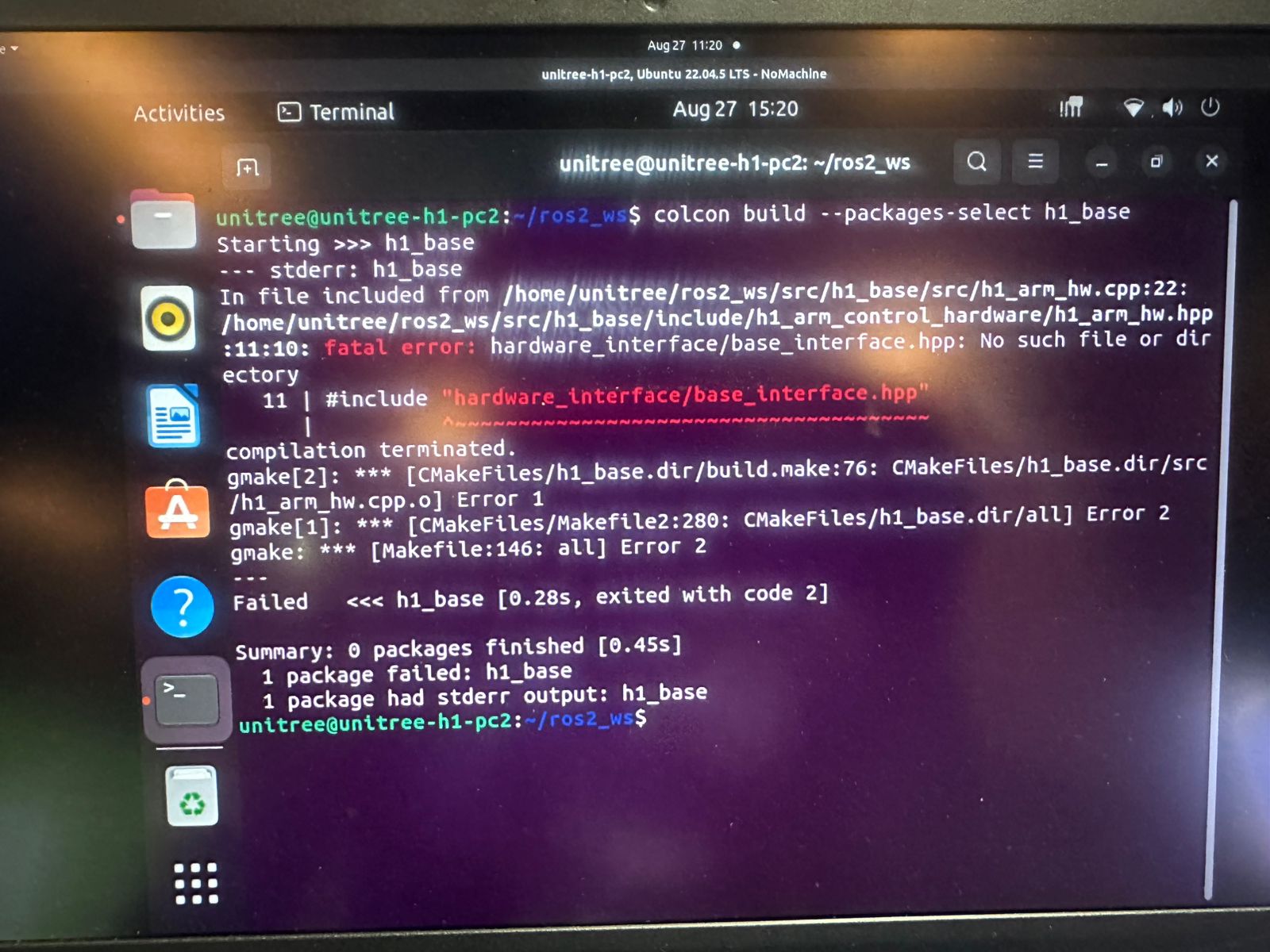
Finally, when I try to build h1_base, I get the following error:
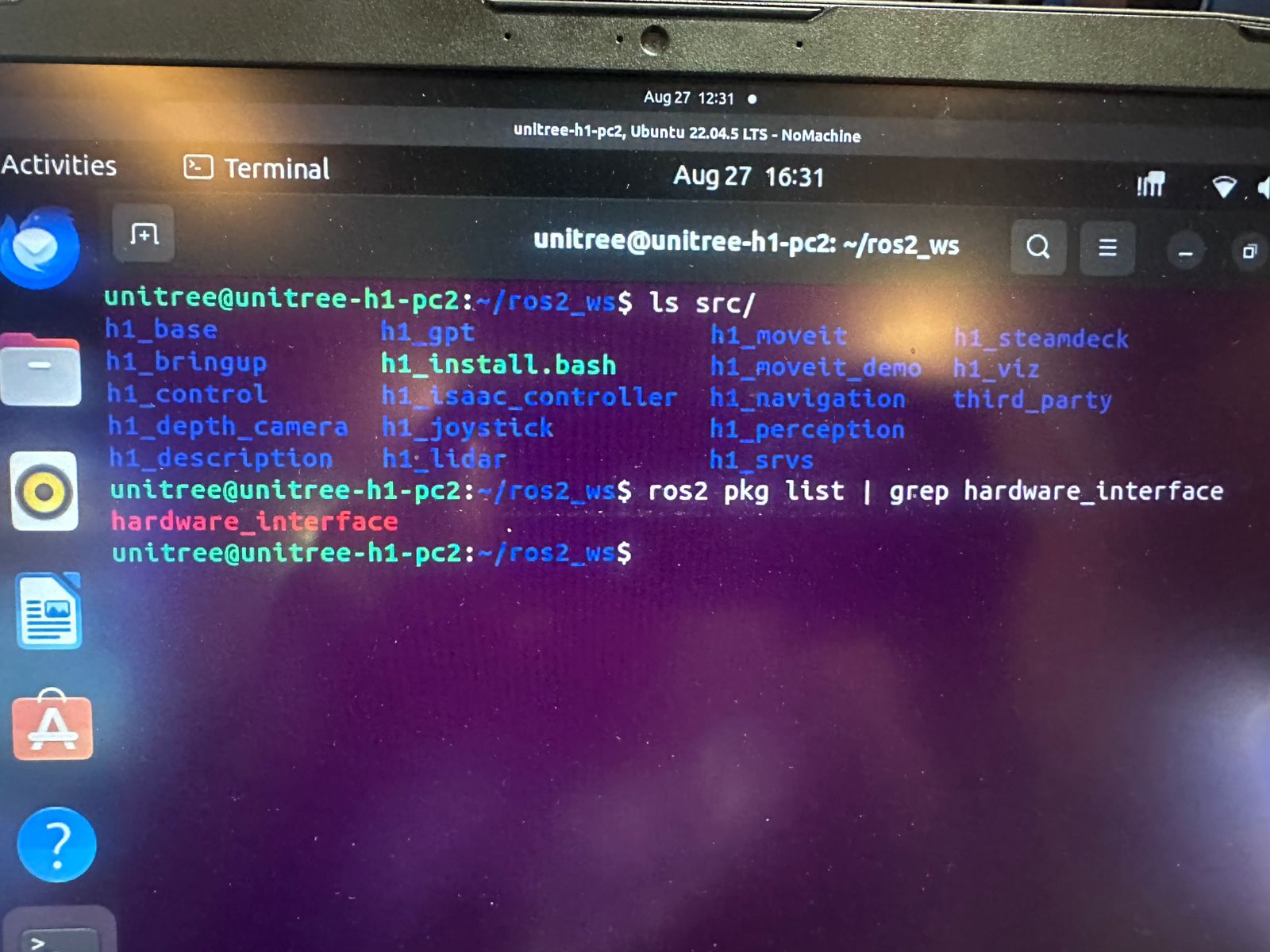
“hardware_interface” not found, even though I already have the hardware_interface package installed.
I’ve confirmed that ros2_control is installed, and I can use other packages that depend on hardware_interface without issues. My ROS 2 distro is humble.
Any idea what might be going wrong? Am I missing a specific version or dependency?
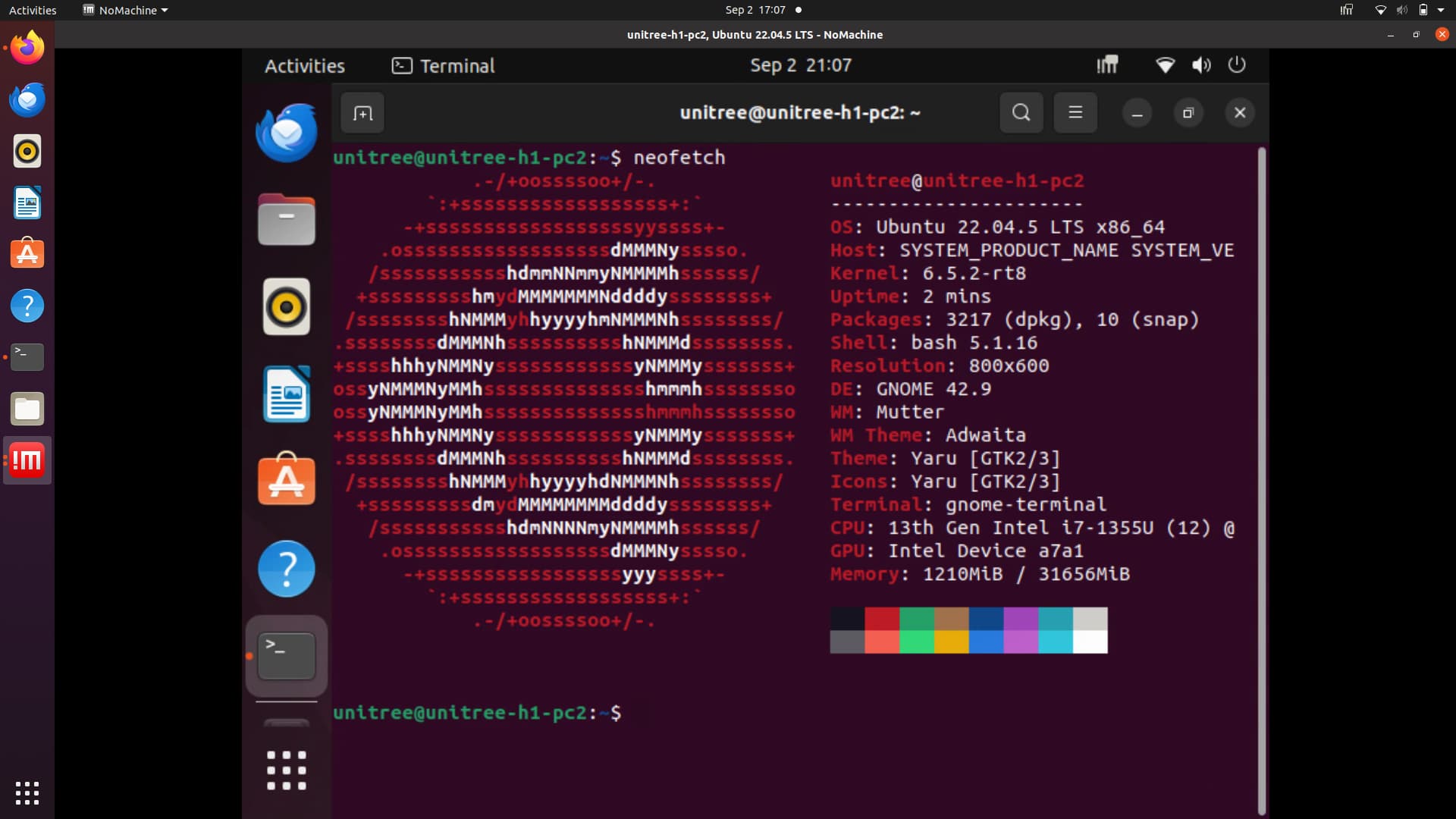
Furthermore, I ran neofetch on the H1 PC2 onboard computer, but it didn’t show the ROS distro in the output. To confirm, I used the rosdistro command instead, and I can verify that the system is running ROS 2 Humble.