hi ,
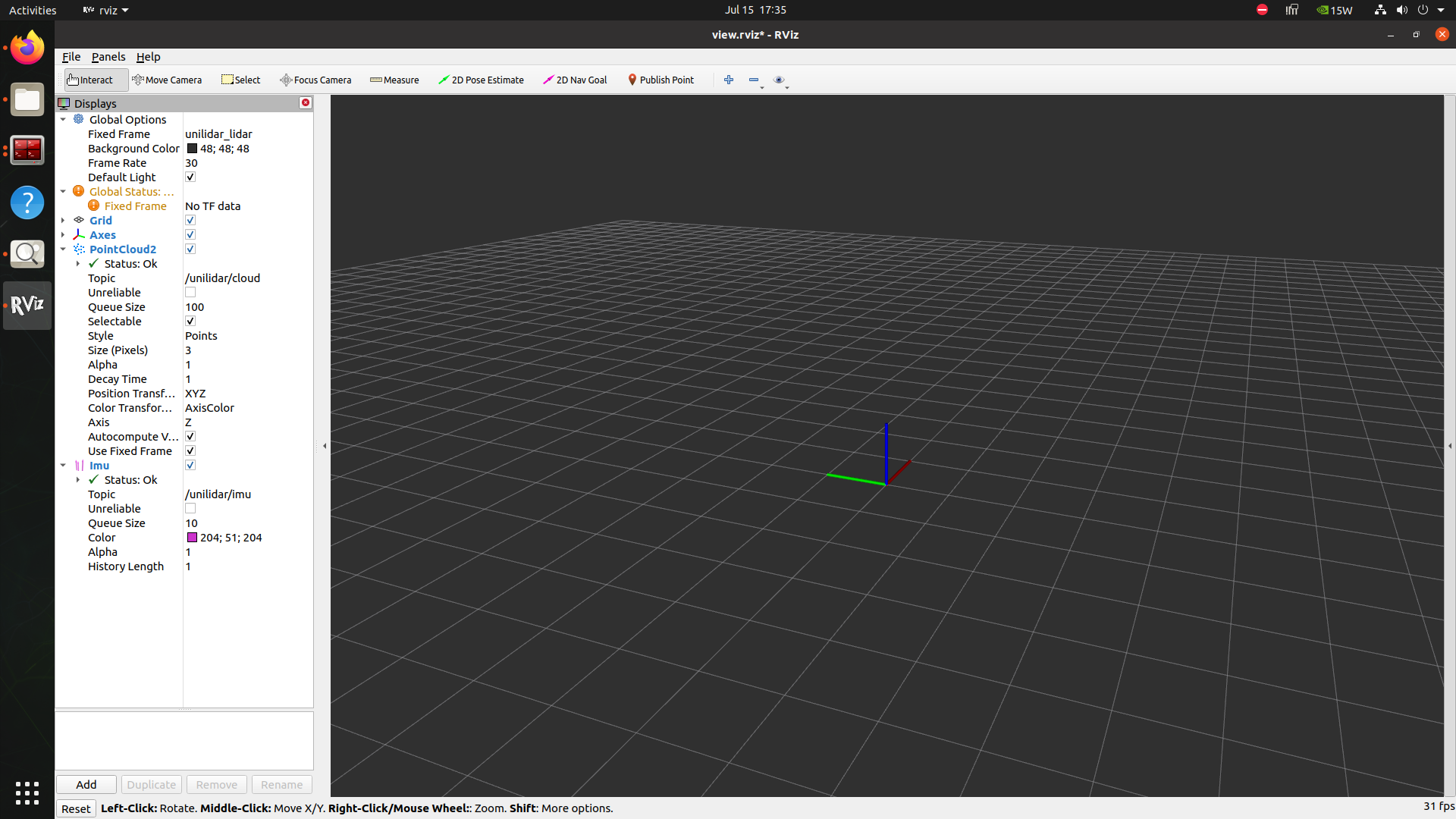
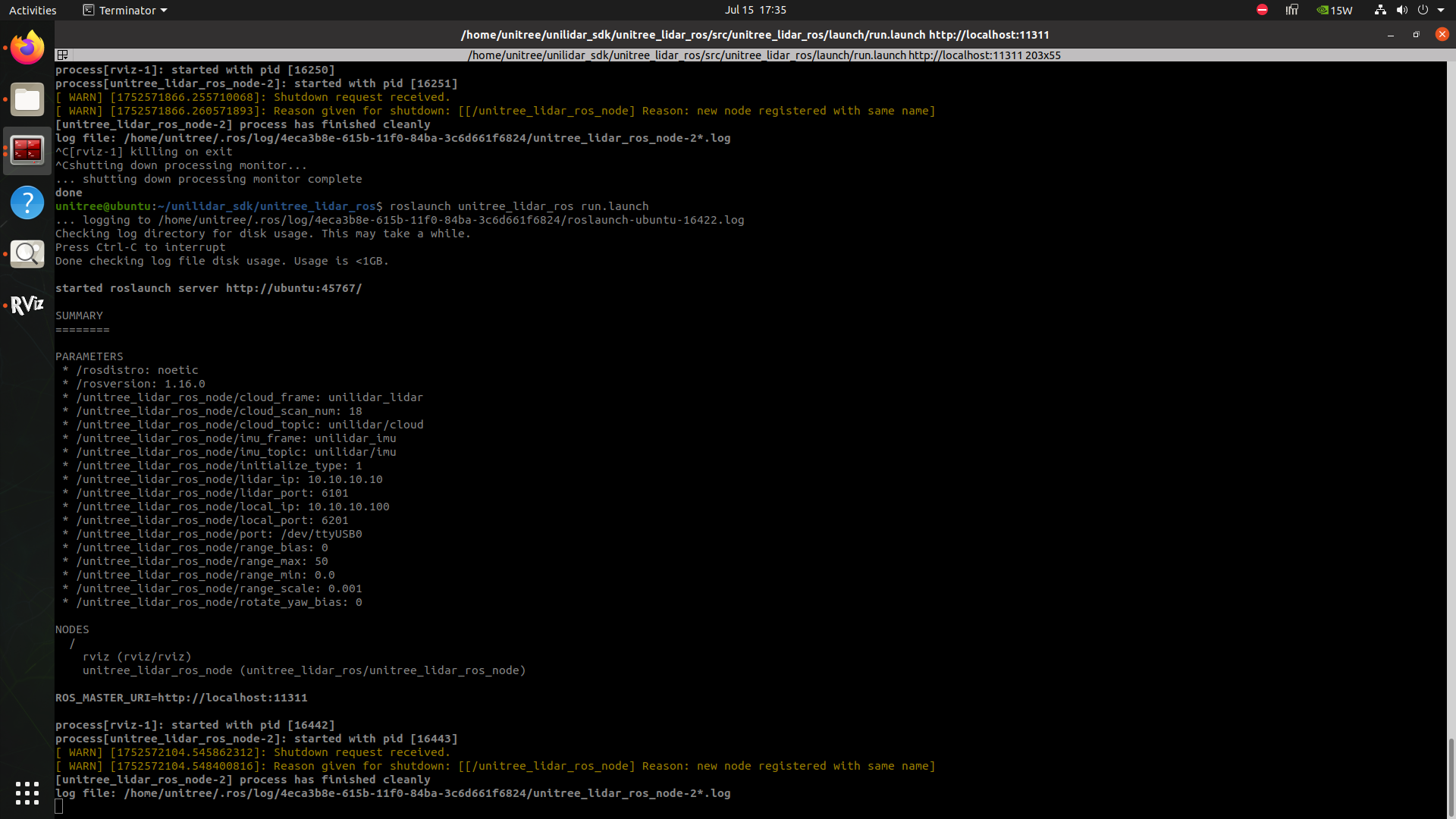
i am facing some issues with accessing the the LiDAR of the Unitree go2w. Here i have setup all the sdk for the lIDAR and after running the launch the rviz will get launched but there wont be any liDAR projections showing in it.When i checked there is some issues with the publisher and subscriber part.
the one which is already in the chin, inbuilt.
when i was launching the the “point_lio_unilidar” using the command, the Rviz is getting launched.
also when i tried to contact with the Unitree support and was explaining the error i am facing they are saying that the
“livox_Rviz? That’s for mid-360.
Not L1
We didn’t give tf-data in the rviz.
You have to set by yourself.”
If you are our customer contact support@mybotshop.de and with your order id and github userid and gain access to qre_go2. In there follow instructions and the pointcloud from the chin etc is already set up.
Also the /utlidar/deskewed already has the point cloud you can check the frame id in the topic itself and put it in RViz2 and it will show up.
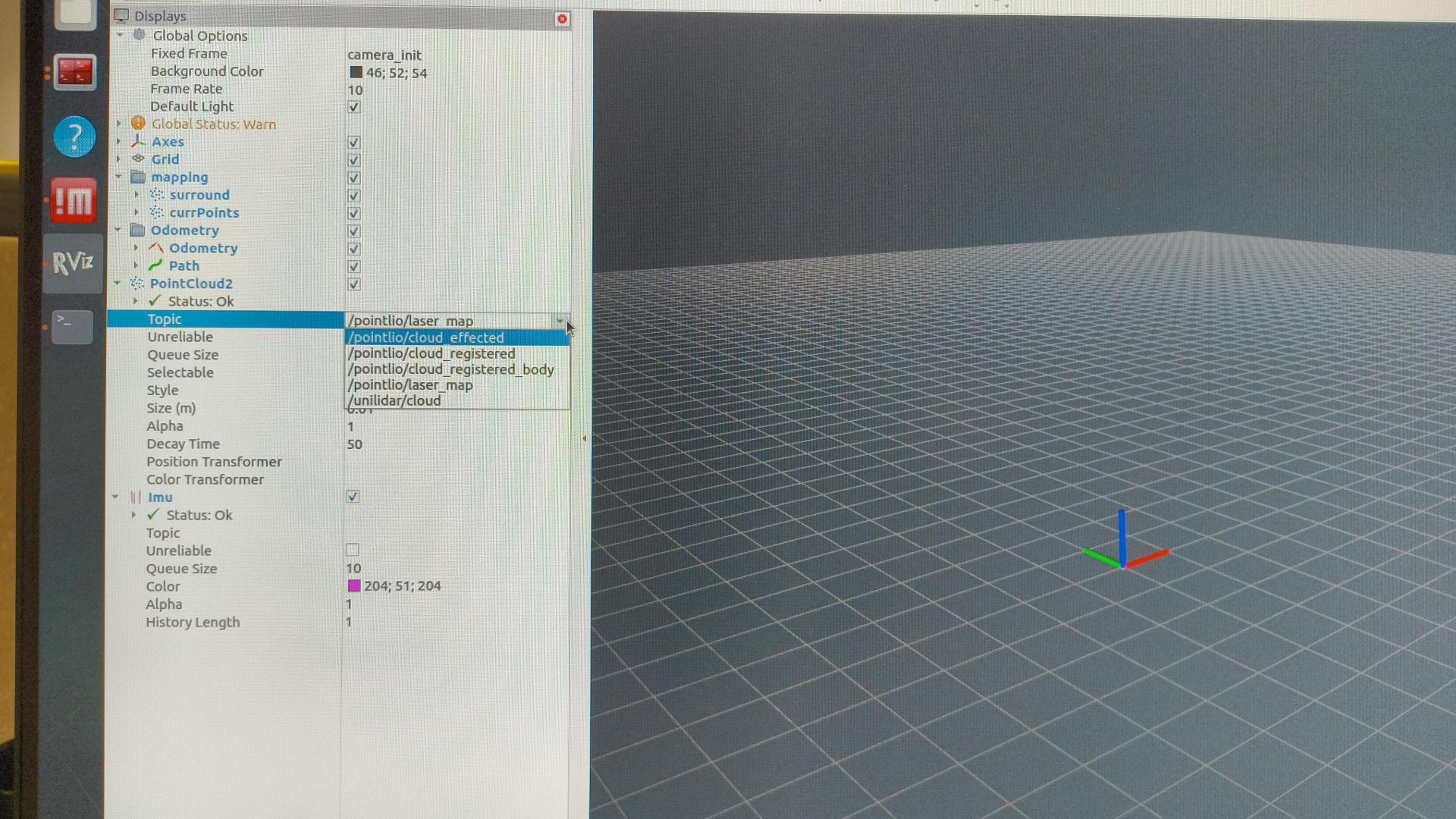
Despite the launch completing without error, I am unsure whether all the required ROS topics are being published and subscribed to correctly, especially with respect to:
Point cloud data
IMU data
Odometry
Path
TF frames
Current Node Graph
From the output of rqt_graph, here’s the current state of the system: