Hi, we are attempting to get the Unitree Go2W operational, with the end goal of using a SLAM tool.
Every time we start the robot, it says “Exit Obstacle Avoidance” and the LED turns blue.
We successfully connected to the robot via Wi-Fi using the Unitree App and installed updates. However, we only see the AI Chatbot under the ‘Functions’ menu, and it appears that we are missing features in the controller area of the app.
We connected via SSH, but were unable to successfully execute any commands there.
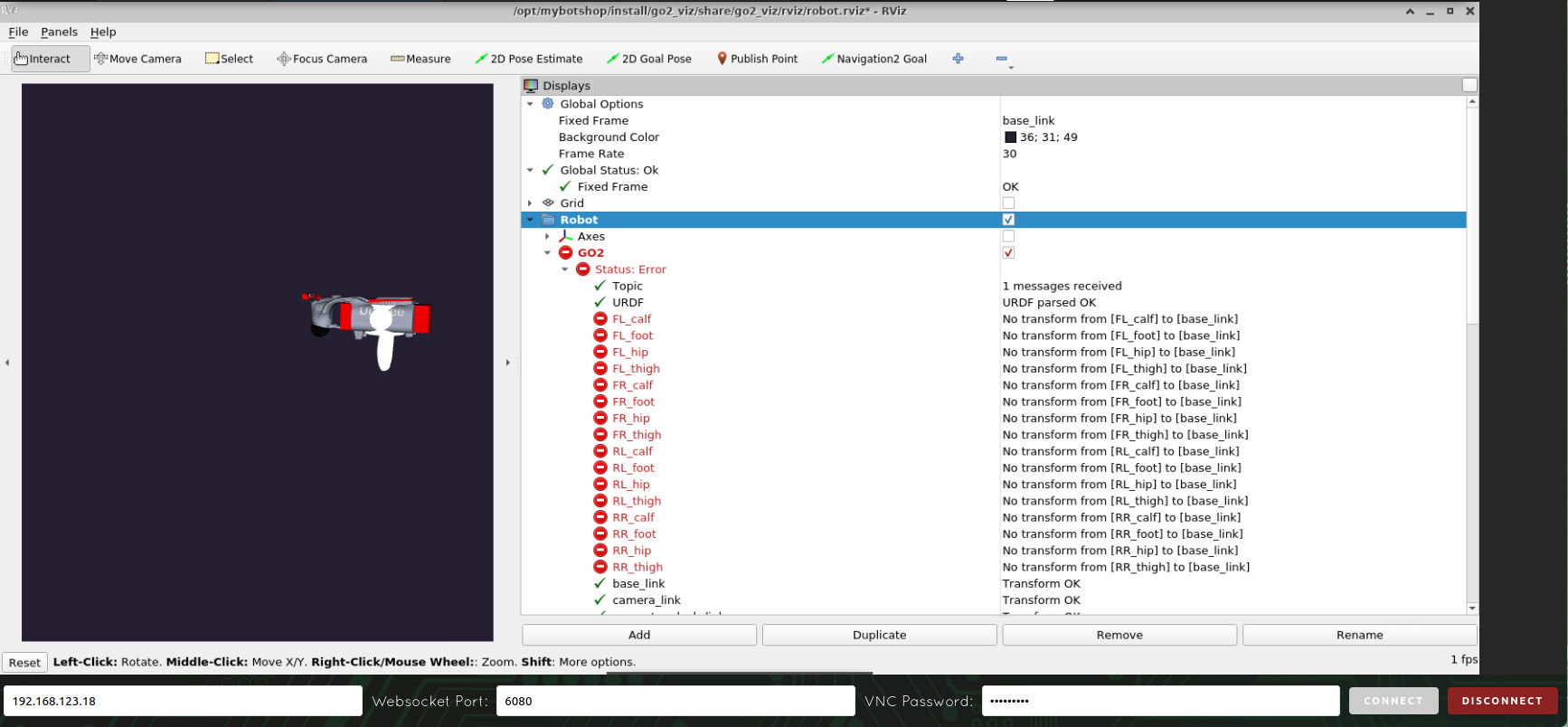
We also connected via the Webserver VNC and successfully launched the ROS 2 files for SLAM, Odometry, and Map. Despite this, the SLAM and odometry nodes are publishing Transform errors for the /map and /odom frames. Additionally, RViz shows an error on the /go2_xxxx/robot_description topic because the transforms for the legs are not being published. Crucially, the /joint_status topic remains empty, despite having a publisher and subscriber.
The unitree guys are still updating the GO2-W firmware and they have currently disabled the chin lidar output poing cloud due to which neither the odom or slam willl work unless you have a different methods such as VSLAM or are using a separate lidar. We anticipate that in the upcoming go2-w firnware updates they will reinstate this feature and then the existing qre-go2 repository should work with it as well.
The drivers of go2 are not running. Once you have access to the go2 repository. Please follow the instructions for running the go2. The Go2 TF’s should work regardless when you are at base_link.
Hi, have you managed to get the chin LiDAR working? We’re facing a similar issue — no point cloud (in ROS2 topic) is coming from the chin LiDAR on our Go2W. I can see chin lidar metrics in the Unitree Go app but the visualization isn’t there as well.