go2_bringup
I was going through the booklet, and came across the verfiying step for go2_bringup and faced this error…
I have followed all the process step by step for installing repo in jetson (foxy-nvidia) and host (foxy) branch and able to load up go2_viz view_robot.launch.py
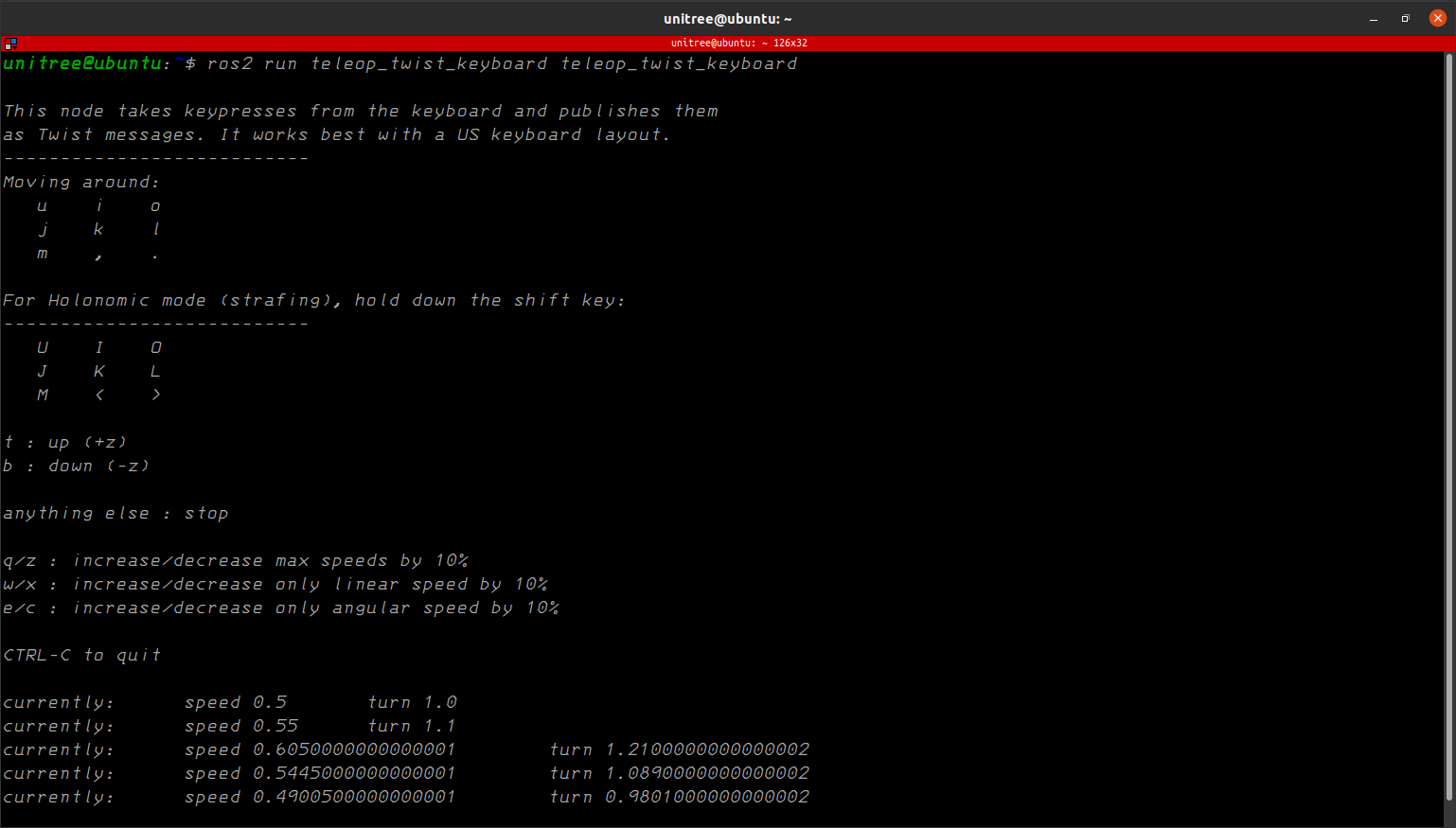
Teleop twist keyboard
Also while performing teleop, I was able to increase/decrease speed, and all but not able to move the robot trhough u,i,o keys…
Hi are you using v1.5 or v2.0, if v1.5 please check the go2_bringup/scripts/startup_installer.py for service names as they were changed in the final update of v1.5 it probably is be go2-
Hello Sohail, My problem got resolved with v1.5 release repo but I have hesai xt16 lidar and I want to perform slam, should I again revert to v2.0 release or is there a way I can get required drivers and package for Lidar Hesai XT16 model?