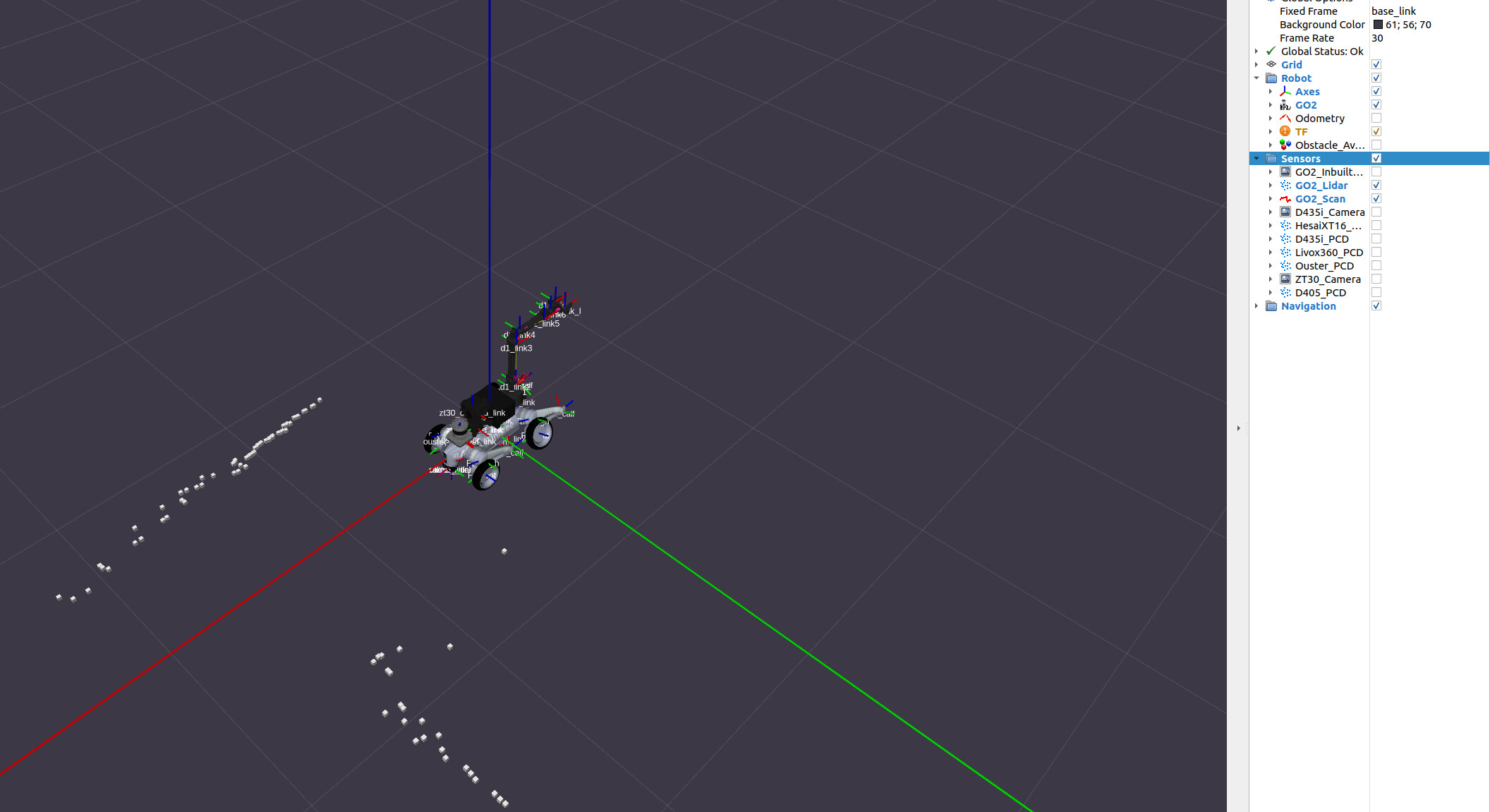
I will try to make screenshots but I don’t think it will be more usefull that the ones upside.
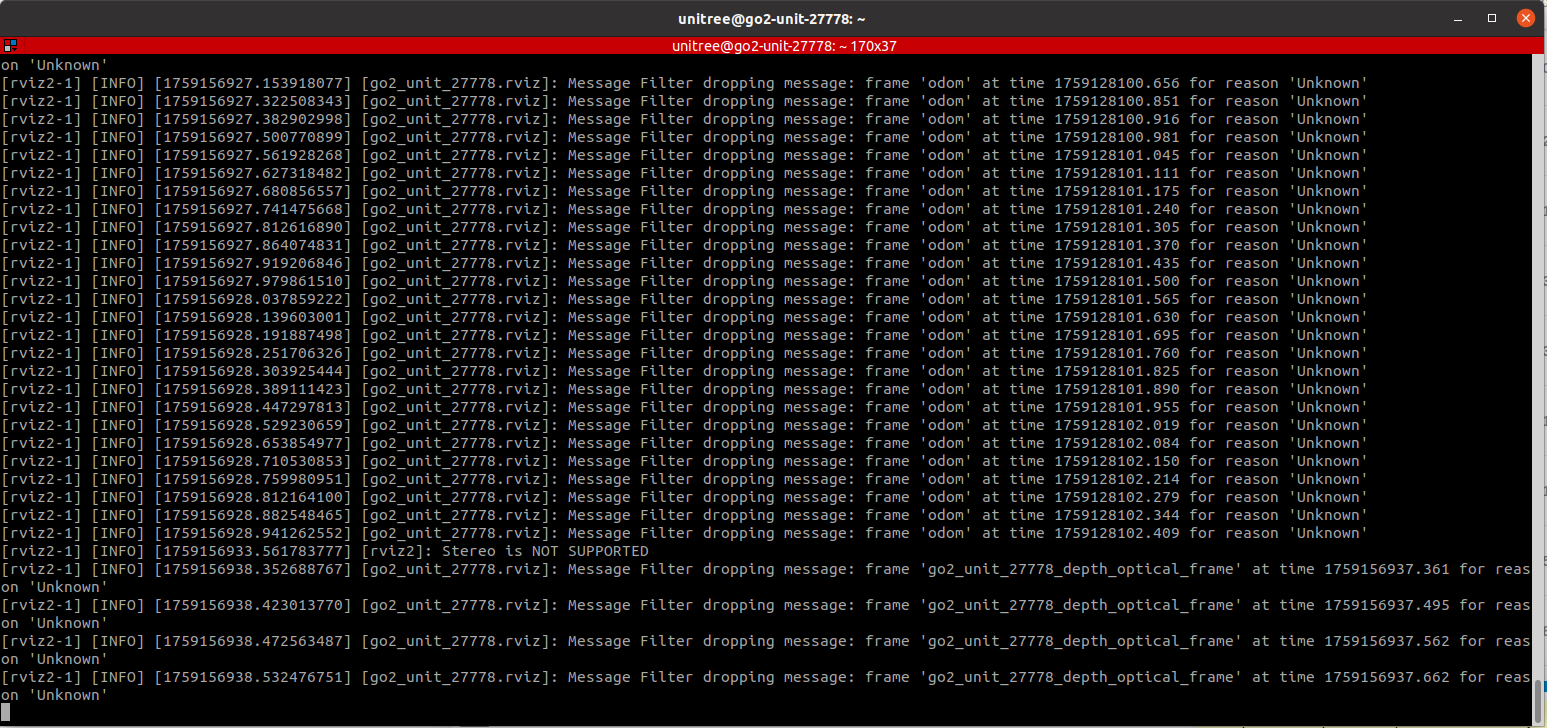
May it be a problem related with the clock ?
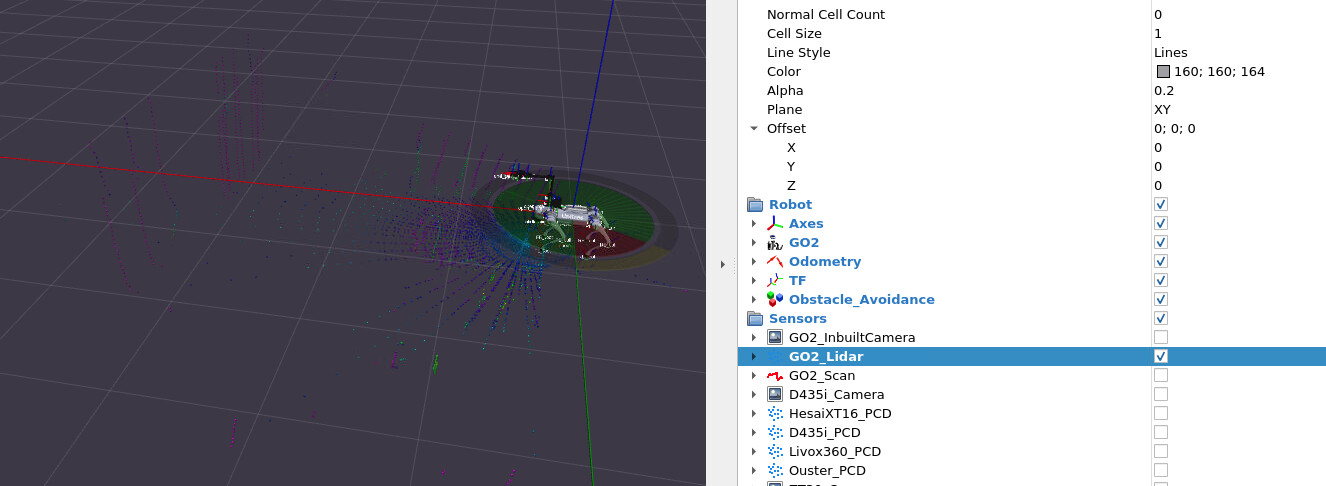
I managed to make the lidar works 2 times, without changing anything in the config.
The only things I do was to plug a USB/Ethernet dongle and the jetson to the Internet so the jetson computer has a correct time.
Currently the robot is only connected thru USB-C to a dock with a screen and a keyboard so each time it boot, the date is reset to 1970
I really think it’s a time desynchronisation that make embedded computer reporting different timestamp to the nvidia computer (wich didn’t had access to the internet), and one transform makes the point cloud not working.
Now I’m facing other problems, D435i not detected even with lsusb and wifi is not working on some more secured networks