
I’m working on Unitree Go2 using ROS 2 Foxy with the Nav2 navigation stack for autonomous navigation.
SLAM is working so far, and I can also see the map when I start navigation.
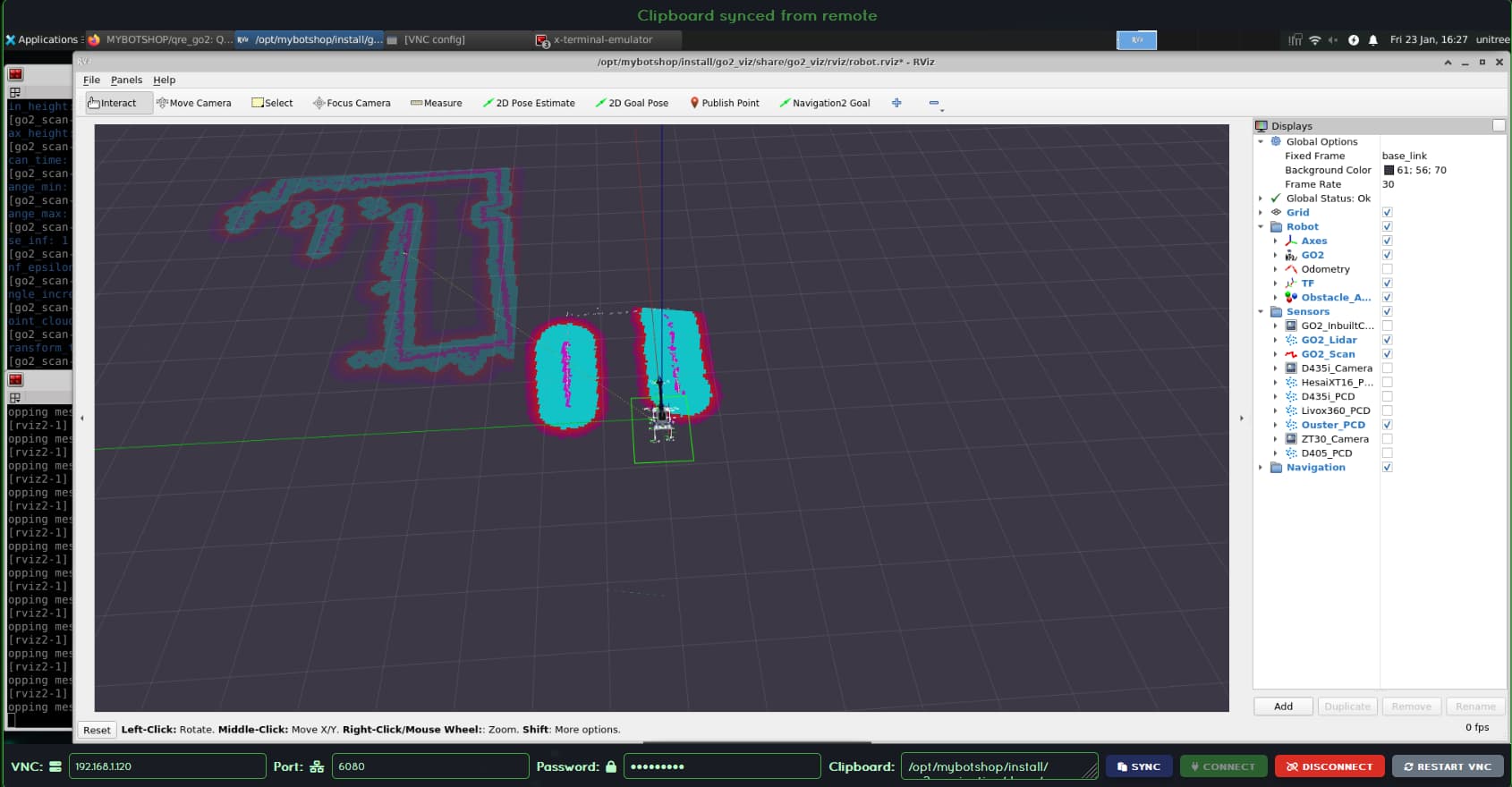
However, when starting, the robot positions itself directly outside the map. When I try to reposition the robot in RViz with 2D Pose Estimate, nothing happens or RViz crashes.
Navigation logs:
[planner_server-5] [WARN] [1769182273.643596096]
[global_costmap.global_costmap]: Sensor origin at (-4.71, -5.00) is
out of map bounds. The costmap cannot raytrace for it.
[planner_server-5] [WARN] [1769182274.647938784] [nav2_costmap_2d]:
Robot is out of bounds of the costmap!
RViz logs:
[rviz2-1] [INFO] [1769417287.804349632] [go2_unit_14082.rviz]: Message
Filter dropping message: frame ‘odom’ at time 1769416520.304 for
reason ‘Unknown’
[rviz2-1] [INFO] [1769417287.955309248] [go2_unit_14082.rviz]: Message
Filter dropping message: frame ‘odom’ at time 1769416520.375 for
reason ‘Unknown’
[ERROR] [rviz2-1]: process has died [pid 20405, exit code -11, cmd
‘/opt/ros/foxy/lib/rviz2/rviz2 -d
/opt/mybotshop/install/go2_viz/share/go2_viz/rviz/robot.rviz
–ros-args -r __node:=rviz -r __ns:=/go2_unit_14082 -r /tf:=tf -r
/tf_static:=tf_static’].
How can I fix the error?