
Hello eveyone!
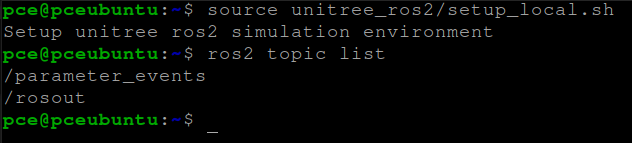
I want use unitree ros2 for simulation purpose when I am not connected to dog. As per unitree github repo they have mentioned to source the setup_local.sh file.

I did that but when i did ros2 topic list no topics were visible.
Are there any other settings or configraution I have to do?
Thanks in advance…