Hi,
I am using QRE GO2 EDU and I am testing the action modes steps in the manual.
I have tested before with ROS_DOMAIN_ID=10 ros2 service call /go2_unit_41097/modes go2_interface/srv/Go2Modes "{request_data: ’stand_up’}" and it only works when I use the terminal on remote screen on webserver. Action modes with a terminal using SSH to the GO2 is not working.
But today when I trying again on the terminal on remote screen on webserver, it does not work anymore. And I get such response response: go2_interface.srv.Go2Modes_Response(success=False, reason='Failed to set GO2 mode')
Does anyone have similar situation? Many thanks in advance!
Are the drivers running? (You can confirm via the webserver)
Are you in the correct DDS domain 10?
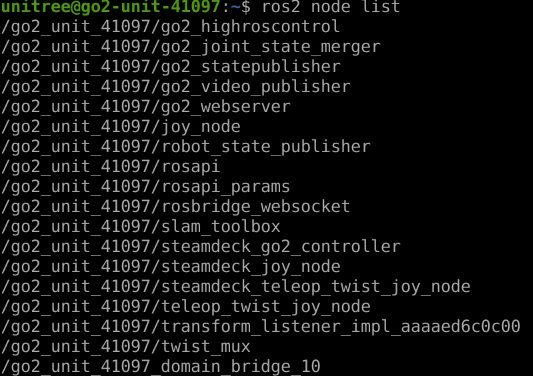
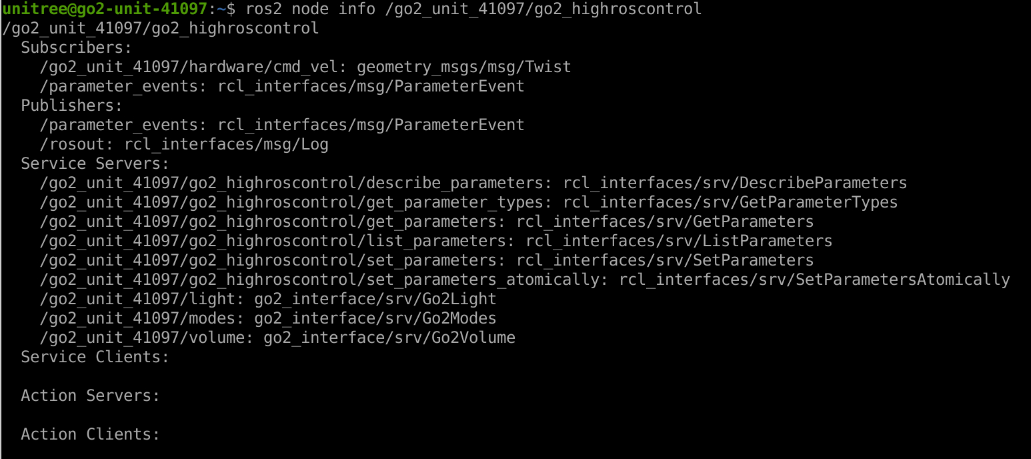
Can you do ros2 topic list/ ros2 action list and see if the action topics show up?
Is the namespace correct go2_unit_41097 and corresponds to the action topics showing up?
If everything above is correct
Has the DDS configuration been set correctly. Try using cyclonedds when testing via terminal.
Please note that once the drivers are started via the webserver without error, then when you ssh and set the domain id to 10 it should work out of the box.
Now it is working and it only works while using your given command ROS_DOMAIN_ID=10 ros2 service call /$GO2_NS/modes go2_interface/srv/Go2Modes "{request_data: 'stand_down'}"
And still not working when I call the service /go2_unit_41097/modes go2_interface/srv/Go2Modes