How can I connect the NVIDIA Jetson board, head (ip: 13), to the internet? I could transfer the repo packages via SSH, but the internet is required for installation. Could you please guide me on how I can do that?
When I am connected to to head-board via SSH, I am already connected to GO1 wifi, that’s why I when I tried to transfer the internet, it was not possible.
Thanks Sohail. You have mentioned that your package should be installed on PC and NVIDIA boards. What do you mean by PC? Raspberry Pi or our laptop? (I am talking about setting up multi-machine setup for cameras))
Should I clone noetic version repo, right?(for both my laptop and NVIDIAs?
If I need only camera data from the front camera (head), I should install packages only the head board and my pc and then setting up the multi-machine, right?
For your PC you can use noetic branch of qre_go1 for the Nvidias, if you are only using the cameras then noetic branch can work their as well, otherwise melodic branch.
If I need only camera data from the front camera (head), I should install packages only the head board and my pc and then setting up the multi-machine, right?
Thank you for your reply. I am using the university’s internet. I could connect the NVIDIA board with the help of the IT team at my university (that was really tricky!), and now, the boards are connected to the internet. However, when I am running the following command, rosdep install --from-paths src --ignore-src -r -y, I get the following error:
Unpacking ros-melodic-ecl-errors (0.61.6-0bionic.20200802.064212) …
Selecting previously unselected package ros-melodic-ecl-exceptions.
Preparing to unpack …/07-ros-melodic-ecl-exceptions_0.62.2-0bionic.20200802.103325_arm64.deb …
Unpacking ros-melodic-ecl-exceptions (0.62.2-0bionic.20200802.103325) …
Selecting previously unselected package ros-melodic-ecl-time-lite.
Preparing to unpack …/08-ros-melodic-ecl-time-lite_0.61.6-0bionic.20200802.103423_arm64.deb …
Unpacking ros-melodic-ecl-time-lite (0.61.6-0bionic.20200802.103423) …
Selecting previously unselected package ros-melodic-ecl-time.
Preparing to unpack …/09-ros-melodic-ecl-time_0.62.2-0bionic.20200802.104643_arm64.deb …
Unpacking ros-melodic-ecl-time (0.62.2-0bionic.20200802.104643) …
Selecting previously unselected package ros-melodic-ecl-utilities.
Preparing to unpack …/10-ros-melodic-ecl-utilities_0.62.2-0bionic.20200802.111516_arm64.deb …
Unpacking ros-melodic-ecl-utilities (0.62.2-0bionic.20200802.111516) …
Selecting previously unselected package ros-melodic-ecl-threads.
Preparing to unpack …/11-ros-melodic-ecl-threads_0.62.2-0bionic.20200802.112501_arm64.deb …
Unpacking ros-melodic-ecl-threads (0.62.2-0bionic.20200802.112501) …
Setting up ros-melodic-ecl-license (0.61.8-1bionic.20200802.050116) …
Setting up ros-melodic-ecl-build (0.61.8-1bionic.20200802.050549) …
Setting up ros-melodic-ecl-config (0.61.6-0bionic.20200802.063202) …
Setting up ros-melodic-ecl-mpl (0.62.2-0bionic.20200802.050714) …
Setting up ros-melodic-ecl-errors (0.61.6-0bionic.20200802.064212) …
Setting up ros-melodic-ecl-type-traits (0.62.2-0bionic.20200802.103445) …
Setting up ros-melodic-ecl-time-lite (0.61.6-0bionic.20200802.103423) …
Setting up ros-melodic-ecl-exceptions (0.62.2-0bionic.20200802.103325) …
Setting up ros-melodic-ecl-concepts (0.62.2-0bionic.20200802.104611) …
Setting up ros-melodic-ecl-time (0.62.2-0bionic.20200802.104643) …
Setting up ros-melodic-ecl-utilities (0.62.2-0bionic.20200802.111516) …
Setting up ros-melodic-ecl-threads (0.62.2-0bionic.20200802.112501) …
executing command [sudo -H apt-get install -y ros-melodic-interactive-marker-twist-server]
Reading package lists… Done
Building dependency tree
Reading state information… Done
The following packages were automatically installed and are no longer required:
apt-clone archdetect-deb bogl-bterm busybox-static cryptsetup-bin dpkg-repack gir1.2-timezonemap-1.0 gir1.2-xkl-1.0 grub-common kde-window-manager kinit kio kpackagetool5
kwayland-data kwin-common kwin-data kwin-x11 libdebian-installer4 libkdecorations2-5v5 libkdecorations2private5v5 libkf5activities5 libkf5attica5 libkf5completion-data
libkf5completion5 libkf5declarative-data libkf5declarative5 libkf5doctools5 libkf5globalaccel-data libkf5globalaccel5 libkf5globalaccelprivate5 libkf5idletime5 libkf5jobwidgets-data
libkf5jobwidgets5 libkf5kcmutils-data libkf5kcmutils5 libkf5kiocore5 libkf5kiontlm5 libkf5kiowidgets5 libkf5newstuff-data libkf5newstuff5 libkf5newstuffcore5 libkf5package-data
libkf5package5 libkf5plasma5 libkf5quickaddons5 libkf5solid5 libkf5solid5-data libkf5sonnet5-data libkf5sonnetcore5 libkf5sonnetui5 libkf5textwidgets-data libkf5textwidgets5
libkf5waylandclient5 libkf5waylandserver5 libkf5xmlgui-bin libkf5xmlgui-data libkf5xmlgui5 libkscreenlocker5 libkwin4-effect-builtins1 libkwineffects11 libkwinglutils11
libkwinxrenderutils11 libqgsttools-p1 libqt5multimedia5 libqt5multimedia5-plugins libqt5multimediaquick-p5 libqt5multimediawidgets5 libxcb-composite0 libxcb-cursor0 libxcb-damage0
os-prober python3-dbus.mainloop.pyqt5 python3-icu python3-pam python3-pyqt5 python3-pyqt5.qtsvg python3-pyqt5.qtwebkit python3-sip qml-module-org-kde-kquickcontrolsaddons
qml-module-qtmultimedia qml-module-qtquick2 rdate tasksel tasksel-data
Use ‘sudo apt autoremove’ to remove them.
The following NEW packages will be installed:
ros-melodic-interactive-marker-twist-server
0 upgraded, 1 newly installed, 0 to remove and 338 not upgraded.
Need to get 25.8 kB of archives.
After this operation, 105 kB of additional disk space will be used.
Err:1 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main arm64 ros-melodic-interactive-marker-twist-server arm64 1.2.2-1bionic.20220127.172054
404 Not Found [IP: 101.6.15.130 80]
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-interactive-marker-twist-server/ros-melodic-interactive-marker-twist-server_1.2.2-1bionic.20220127.172054_arm64.deb 404 Not Found [IP: 101.6.15.130 80]
E: Unable to fetch some archives, maybe run apt-get update or try with --fix-missing?
executing command [sudo -H apt-get install -y ros-melodic-teleop-twist-joy]
Reading package lists… Done
Building dependency tree
Reading state information… Done
The following packages were automatically installed and are no longer required:
apt-clone archdetect-deb bogl-bterm busybox-static cryptsetup-bin dpkg-repack gir1.2-timezonemap-1.0 gir1.2-xkl-1.0 grub-common kde-window-manager kinit kio kpackagetool5
kwayland-data kwin-common kwin-data kwin-x11 libdebian-installer4 libkdecorations2-5v5 libkdecorations2private5v5 libkf5activities5 libkf5attica5 libkf5completion-data
libkf5completion5 libkf5declarative-data libkf5declarative5 libkf5doctools5 libkf5globalaccel-data libkf5globalaccel5 libkf5globalaccelprivate5 libkf5idletime5 libkf5jobwidgets-data
libkf5jobwidgets5 libkf5kcmutils-data libkf5kcmutils5 libkf5kiocore5 libkf5kiontlm5 libkf5kiowidgets5 libkf5newstuff-data libkf5newstuff5 libkf5newstuffcore5 libkf5package-data
libkf5package5 libkf5plasma5 libkf5quickaddons5 libkf5solid5 libkf5solid5-data libkf5sonnet5-data libkf5sonnetcore5 libkf5sonnetui5 libkf5textwidgets-data libkf5textwidgets5
libkf5waylandclient5 libkf5waylandserver5 libkf5xmlgui-bin libkf5xmlgui-data libkf5xmlgui5 libkscreenlocker5 libkwin4-effect-builtins1 libkwineffects11 libkwinglutils11
libkwinxrenderutils11 libqgsttools-p1 libqt5multimedia5 libqt5multimedia5-plugins libqt5multimediaquick-p5 libqt5multimediawidgets5 libxcb-composite0 libxcb-cursor0 libxcb-damage0
os-prober python3-dbus.mainloop.pyqt5 python3-icu python3-pam python3-pyqt5 python3-pyqt5.qtsvg python3-pyqt5.qtwebkit python3-sip qml-module-org-kde-kquickcontrolsaddons
qml-module-qtmultimedia qml-module-qtquick2 rdate tasksel tasksel-data
Use ‘sudo apt autoremove’ to remove them.
The following additional packages will be installed:
evemu-tools evtest joystick libevemu3 ros-melodic-joy
The following NEW packages will be installed:
evemu-tools evtest joystick libevemu3 ros-melodic-joy ros-melodic-teleop-twist-joy
0 upgraded, 6 newly installed, 0 to remove and 338 not upgraded.
Need to get 85.4 kB/168 kB of archives.
After this operation, 712 kB of additional disk space will be used.
Err:1 Index of /ros/ubuntu/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror bionic/main arm64 ros-melodic-joy arm64 1.14.0-1bionic.20220127.163500
404 Not Found [IP: 101.6.15.130 80]
Err:2 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main arm64 ros-melodic-teleop-twist-joy arm64 0.1.3-0bionic.20220127.163812
404 Not Found [IP: 101.6.15.130 80]
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-joy/ros-melodic-joy_1.14.0-1bionic.20220127.163500_arm64.deb 404 Not Found [IP: 101.6.15.130 80]
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-teleop-twist-joy/ros-melodic-teleop-twist-joy_0.1.3-0bionic.20220127.163812_arm64.deb 404 Not Found [IP: 101.6.15.130 80]
E: Unable to fetch some archives, maybe run apt-get update or try with --fix-missing?
executing command [sudo -H apt-get install -y ros-melodic-twist-mux]
Reading package lists… Done
Building dependency tree
Reading state information… Done
The following packages were automatically installed and are no longer required:
apt-clone archdetect-deb bogl-bterm busybox-static cryptsetup-bin dpkg-repack gir1.2-timezonemap-1.0 gir1.2-xkl-1.0 grub-common kde-window-manager kinit kio kpackagetool5
kwayland-data kwin-common kwin-data kwin-x11 libdebian-installer4 libkdecorations2-5v5 libkdecorations2private5v5 libkf5activities5 libkf5attica5 libkf5completion-data
libkf5completion5 libkf5declarative-data libkf5declarative5 libkf5doctools5 libkf5globalaccel-data libkf5globalaccel5 libkf5globalaccelprivate5 libkf5idletime5 libkf5jobwidgets-data
libkf5jobwidgets5 libkf5kcmutils-data libkf5kcmutils5 libkf5kiocore5 libkf5kiontlm5 libkf5kiowidgets5 libkf5newstuff-data libkf5newstuff5 libkf5newstuffcore5 libkf5package-data
libkf5package5 libkf5plasma5 libkf5quickaddons5 libkf5solid5 libkf5solid5-data libkf5sonnet5-data libkf5sonnetcore5 libkf5sonnetui5 libkf5textwidgets-data libkf5textwidgets5
libkf5waylandclient5 libkf5waylandserver5 libkf5xmlgui-bin libkf5xmlgui-data libkf5xmlgui5 libkscreenlocker5 libkwin4-effect-builtins1 libkwineffects11 libkwinglutils11
libkwinxrenderutils11 libqgsttools-p1 libqt5multimedia5 libqt5multimedia5-plugins libqt5multimediaquick-p5 libqt5multimediawidgets5 libxcb-composite0 libxcb-cursor0 libxcb-damage0
os-prober python3-dbus.mainloop.pyqt5 python3-icu python3-pam python3-pyqt5 python3-pyqt5.qtsvg python3-pyqt5.qtwebkit python3-sip qml-module-org-kde-kquickcontrolsaddons
qml-module-qtmultimedia qml-module-qtquick2 rdate tasksel tasksel-data
Use ‘sudo apt autoremove’ to remove them.
The following additional packages will be installed:
ros-melodic-twist-mux-msgs
The following NEW packages will be installed:
ros-melodic-twist-mux ros-melodic-twist-mux-msgs
0 upgraded, 2 newly installed, 0 to remove and 338 not upgraded.
Need to get 115 kB of archives.
After this operation, 1,117 kB of additional disk space will be used.
Err:1 Index of /ros/ubuntu/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror bionic/main arm64 ros-melodic-twist-mux-msgs arm64 2.1.0-6bionic.20220127.175104
404 Not Found [IP: 101.6.15.130 80]
Err:2 Index of /ros/ubuntu/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror bionic/main arm64 ros-melodic-twist-mux arm64 3.1.1-1bionic.20220127.175420
404 Not Found [IP: 101.6.15.130 80]
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-twist-mux-msgs/ros-melodic-twist-mux-msgs_2.1.0-6bionic.20220127.175104_arm64.deb 404 Not Found [IP: 101.6.15.130 80]
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-twist-mux/ros-melodic-twist-mux_3.1.1-1bionic.20220127.175420_arm64.deb 404 Not Found [IP: 101.6.15.130 80]
E: Unable to fetch some archives, maybe run apt-get update or try with --fix-missing?
executing command [sudo -H apt-get install -y ros-melodic-ros-controllers]
Reading package lists… Done
Building dependency tree
Reading state information… Done
The following packages were automatically installed and are no longer required:
apt-clone archdetect-deb bogl-bterm busybox-static cryptsetup-bin dpkg-repack gir1.2-timezonemap-1.0 gir1.2-xkl-1.0 grub-common kde-window-manager kinit kio kpackagetool5
kwayland-data kwin-common kwin-data kwin-x11 libdebian-installer4 libkdecorations2-5v5 libkdecorations2private5v5 libkf5activities5 libkf5attica5 libkf5completion-data
libkf5completion5 libkf5declarative-data libkf5declarative5 libkf5doctools5 libkf5globalaccel-data libkf5globalaccel5 libkf5globalaccelprivate5 libkf5idletime5 libkf5jobwidgets-data
libkf5jobwidgets5 libkf5kcmutils-data libkf5kcmutils5 libkf5kiocore5 libkf5kiontlm5 libkf5kiowidgets5 libkf5newstuff-data libkf5newstuff5 libkf5newstuffcore5 libkf5package-data
libkf5package5 libkf5plasma5 libkf5quickaddons5 libkf5solid5 libkf5solid5-data libkf5sonnet5-data libkf5sonnetcore5 libkf5sonnetui5 libkf5textwidgets-data libkf5textwidgets5
libkf5waylandclient5 libkf5waylandserver5 libkf5xmlgui-bin libkf5xmlgui-data libkf5xmlgui5 libkscreenlocker5 libkwin4-effect-builtins1 libkwineffects11 libkwinglutils11
libkwinxrenderutils11 libqgsttools-p1 libqt5multimedia5 libqt5multimedia5-plugins libqt5multimediaquick-p5 libqt5multimediawidgets5 libxcb-composite0 libxcb-cursor0 libxcb-damage0
os-prober python3-dbus.mainloop.pyqt5 python3-icu python3-pam python3-pyqt5 python3-pyqt5.qtsvg python3-pyqt5.qtwebkit python3-sip qml-module-org-kde-kquickcontrolsaddons
qml-module-qtmultimedia qml-module-qtquick2 rdate tasksel tasksel-data
Use ‘sudo apt autoremove’ to remove them.
The following additional packages will be installed:
ros-melodic-ackermann-steering-controller ros-melodic-effort-controllers ros-melodic-force-torque-sensor-controller ros-melodic-gripper-action-controller
ros-melodic-imu-sensor-controller ros-melodic-joint-trajectory-controller ros-melodic-velocity-controllers
The following NEW packages will be installed:
ros-melodic-ackermann-steering-controller ros-melodic-effort-controllers ros-melodic-force-torque-sensor-controller ros-melodic-gripper-action-controller
ros-melodic-imu-sensor-controller ros-melodic-joint-trajectory-controller ros-melodic-ros-controllers ros-melodic-velocity-controllers
0 upgraded, 8 newly installed, 0 to remove and 338 not upgraded.
Need to get 599 kB of archives.
After this operation, 2,907 kB of additional disk space will be used.
Err:1 Index of /ros/ubuntu/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror bionic/main arm64 ros-melodic-ackermann-steering-controller arm64 0.17.2-1bionic.20220517.191053
404 Not Found [IP: 101.6.15.130 80]
Err:2 Index of /ros/ubuntu/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror bionic/main arm64 ros-melodic-effort-controllers arm64 0.17.2-1bionic.20220517.195229
404 Not Found [IP: 101.6.15.130 80]
Err:3 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main arm64 ros-melodic-force-torque-sensor-controller arm64 0.17.2-1bionic.20220127.161206
404 Not Found [IP: 101.6.15.130 80]
Err:4 Index of /ros/ubuntu/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror bionic/main arm64 ros-melodic-gripper-action-controller arm64 0.17.2-1bionic.20220517.195232
404 Not Found [IP: 101.6.15.130 80]
Err:5 Index of /ros/ubuntu/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror bionic/main arm64 ros-melodic-imu-sensor-controller arm64 0.17.2-1bionic.20220127.164940
404 Not Found [IP: 101.6.15.130 80]
Err:6 Index of /ros/ubuntu/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror bionic/main arm64 ros-melodic-joint-trajectory-controller arm64 0.17.2-1bionic.20220517.195257
404 Not Found [IP: 101.6.15.130 80]
Err:7 Index of /ros/ubuntu/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror bionic/main arm64 ros-melodic-velocity-controllers arm64 0.17.2-1bionic.20220517.195439
404 Not Found [IP: 101.6.15.130 80]
Err:8 Index of /ros/ubuntu/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror bionic/main arm64 ros-melodic-ros-controllers arm64 0.17.2-1bionic.20220517.195841
404 Not Found [IP: 101.6.15.130 80]
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-ackermann-steering-controller/ros-melodic-ackermann-steering-controller_0.17.2-1bionic.20220517.191053_arm64.deb 404 Not Found [IP: 101.6.15.130 80]
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-effort-controllers/ros-melodic-effort-controllers_0.17.2-1bionic.20220517.195229_arm64.deb 404 Not Found [IP: 101.6.15.130 80]
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-force-torque-sensor-controller/ros-melodic-force-torque-sensor-controller_0.17.2-1bionic.20220127.161206_arm64.deb 404 Not Found [IP: 101.6.15.130 80]
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-gripper-action-controller/ros-melodic-gripper-action-controller_0.17.2-1bionic.20220517.195232_arm64.deb 404 Not Found [IP: 101.6.15.130 80]
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-imu-sensor-controller/ros-melodic-imu-sensor-controller_0.17.2-1bionic.20220127.164940_arm64.deb 404 Not Found [IP: 101.6.15.130 80]
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-joint-trajectory-controller/ros-melodic-joint-trajectory-controller_0.17.2-1bionic.20220517.195257_arm64.deb 404 Not Found [IP: 101.6.15.130 80]
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-velocity-controllers/ros-melodic-velocity-controllers_0.17.2-1bionic.20220517.195439_arm64.deb 404 Not Found [IP: 101.6.15.130 80]
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-ros-controllers/ros-melodic-ros-controllers_0.17.2-1bionic.20220517.195841_arm64.deb 404 Not Found [IP: 101.6.15.130 80]
E: Unable to fetch some archives, maybe run apt-get update or try with --fix-missing?
executing command [sudo -H apt-get install -y ros-melodic-hector-gazebo-plugins]
Reading package lists… Done
Building dependency tree
Reading state information… Done
The following packages were automatically installed and are no longer required:
apt-clone archdetect-deb bogl-bterm busybox-static cryptsetup-bin dpkg-repack gir1.2-timezonemap-1.0 gir1.2-xkl-1.0 grub-common kde-window-manager kinit kio kpackagetool5
kwayland-data kwin-common kwin-data kwin-x11 libdebian-installer4 libkdecorations2-5v5 libkdecorations2private5v5 libkf5activities5 libkf5attica5 libkf5completion-data
libkf5completion5 libkf5declarative-data libkf5declarative5 libkf5doctools5 libkf5globalaccel-data libkf5globalaccel5 libkf5globalaccelprivate5 libkf5idletime5 libkf5jobwidgets-data
libkf5jobwidgets5 libkf5kcmutils-data libkf5kcmutils5 libkf5kiocore5 libkf5kiontlm5 libkf5kiowidgets5 libkf5newstuff-data libkf5newstuff5 libkf5newstuffcore5 libkf5package-data
libkf5package5 libkf5plasma5 libkf5quickaddons5 libkf5solid5 libkf5solid5-data libkf5sonnet5-data libkf5sonnetcore5 libkf5sonnetui5 libkf5textwidgets-data libkf5textwidgets5
libkf5waylandclient5 libkf5waylandserver5 libkf5xmlgui-bin libkf5xmlgui-data libkf5xmlgui5 libkscreenlocker5 libkwin4-effect-builtins1 libkwineffects11 libkwinglutils11
libkwinxrenderutils11 libqgsttools-p1 libqt5multimedia5 libqt5multimedia5-plugins libqt5multimediaquick-p5 libqt5multimediawidgets5 libxcb-composite0 libxcb-cursor0 libxcb-damage0
os-prober python3-dbus.mainloop.pyqt5 python3-icu python3-pam python3-pyqt5 python3-pyqt5.qtsvg python3-pyqt5.qtwebkit python3-sip qml-module-org-kde-kquickcontrolsaddons
qml-module-qtmultimedia qml-module-qtquick2 rdate tasksel tasksel-data
Use ‘sudo apt autoremove’ to remove them.
The following additional packages will be installed:
ros-melodic-geographic-msgs ros-melodic-uuid-msgs
The following NEW packages will be installed:
ros-melodic-geographic-msgs ros-melodic-hector-gazebo-plugins ros-melodic-uuid-msgs
0 upgraded, 3 newly installed, 0 to remove and 338 not upgraded.
Need to get 445 kB of archives.
After this operation, 4,134 kB of additional disk space will be used.
Err:1 Index of /ros/ubuntu/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror bionic/main arm64 ros-melodic-uuid-msgs arm64 1.0.6-0bionic.20210505.095403
404 Not Found [IP: 101.6.15.130 80]
Err:2 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic/main arm64 ros-melodic-geographic-msgs arm64 0.5.3-0bionic.20210505.100037
404 Not Found [IP: 101.6.15.130 80]
Err:3 Index of /ros/ubuntu/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror bionic/main arm64 ros-melodic-hector-gazebo-plugins arm64 0.5.4-1bionic.20220517.181935
404 Not Found [IP: 101.6.15.130 80]
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-uuid-msgs/ros-melodic-uuid-msgs_1.0.6-0bionic.20210505.095403_arm64.deb 404 Not Found [IP: 101.6.15.130 80]
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-geographic-msgs/ros-melodic-geographic-msgs_0.5.3-0bionic.20210505.100037_arm64.deb 404 Not Found [IP: 101.6.15.130 80]
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-hector-gazebo-plugins/ros-melodic-hector-gazebo-plugins_0.5.4-1bionic.20220517.181935_arm64.deb 404 Not Found [IP: 101.6.15.130 80]
E: Unable to fetch some archives, maybe run apt-get update or try with --fix-missing?
executing command [sudo -H apt-get install -y ros-melodic-hector-sensors-description]
Reading package lists… Done
Building dependency tree
Reading state information… Done
The following packages were automatically installed and are no longer required:
apt-clone archdetect-deb bogl-bterm busybox-static cryptsetup-bin dpkg-repack gir1.2-timezonemap-1.0 gir1.2-xkl-1.0 grub-common kde-window-manager kinit kio kpackagetool5
kwayland-data kwin-common kwin-data kwin-x11 libdebian-installer4 libkdecorations2-5v5 libkdecorations2private5v5 libkf5activities5 libkf5attica5 libkf5completion-data
libkf5completion5 libkf5declarative-data libkf5declarative5 libkf5doctools5 libkf5globalaccel-data libkf5globalaccel5 libkf5globalaccelprivate5 libkf5idletime5 libkf5jobwidgets-data
libkf5jobwidgets5 libkf5kcmutils-data libkf5kcmutils5 libkf5kiocore5 libkf5kiontlm5 libkf5kiowidgets5 libkf5newstuff-data libkf5newstuff5 libkf5newstuffcore5 libkf5package-data
libkf5package5 libkf5plasma5 libkf5quickaddons5 libkf5solid5 libkf5solid5-data libkf5sonnet5-data libkf5sonnetcore5 libkf5sonnetui5 libkf5textwidgets-data libkf5textwidgets5
libkf5waylandclient5 libkf5waylandserver5 libkf5xmlgui-bin libkf5xmlgui-data libkf5xmlgui5 libkscreenlocker5 libkwin4-effect-builtins1 libkwineffects11 libkwinglutils11
libkwinxrenderutils11 libqgsttools-p1 libqt5multimedia5 libqt5multimedia5-plugins libqt5multimediaquick-p5 libqt5multimediawidgets5 libxcb-composite0 libxcb-cursor0 libxcb-damage0
os-prober python3-dbus.mainloop.pyqt5 python3-icu python3-pam python3-pyqt5 python3-pyqt5.qtsvg python3-pyqt5.qtwebkit python3-sip qml-module-org-kde-kquickcontrolsaddons
qml-module-qtmultimedia qml-module-qtquick2 rdate tasksel tasksel-data
Use ‘sudo apt autoremove’ to remove them.
The following NEW packages will be installed:
ros-melodic-hector-sensors-description
0 upgraded, 1 newly installed, 0 to remove and 338 not upgraded.
Need to get 84.9 kB of archives.
After this operation, 1,008 kB of additional disk space will be used.
Err:1 Index of /ros/ubuntu/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror bionic/main arm64 ros-melodic-hector-sensors-description arm64 0.5.0-0bionic.20220214.142538
404 Not Found [IP: 101.6.15.130 80]
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-hector-sensors-description/ros-melodic-hector-sensors-description_0.5.0-0bionic.20220214.142538_arm64.deb 404 Not Found [IP: 101.6.15.130 80]
E: Unable to fetch some archives, maybe run apt-get update or try with --fix-missing?
executing command [sudo -H apt-get install -y ros-melodic-velodyne-gazebo-plugins]
Reading package lists… Done
Building dependency tree
Reading state information… Done
The following packages were automatically installed and are no longer required:
apt-clone archdetect-deb bogl-bterm busybox-static cryptsetup-bin dpkg-repack gir1.2-timezonemap-1.0 gir1.2-xkl-1.0 grub-common kde-window-manager kinit kio kpackagetool5
kwayland-data kwin-common kwin-data kwin-x11 libdebian-installer4 libkdecorations2-5v5 libkdecorations2private5v5 libkf5activities5 libkf5attica5 libkf5completion-data
libkf5completion5 libkf5declarative-data libkf5declarative5 libkf5doctools5 libkf5globalaccel-data libkf5globalaccel5 libkf5globalaccelprivate5 libkf5idletime5 libkf5jobwidgets-data
libkf5jobwidgets5 libkf5kcmutils-data libkf5kcmutils5 libkf5kiocore5 libkf5kiontlm5 libkf5kiowidgets5 libkf5newstuff-data libkf5newstuff5 libkf5newstuffcore5 libkf5package-data
libkf5package5 libkf5plasma5 libkf5quickaddons5 libkf5solid5 libkf5solid5-data libkf5sonnet5-data libkf5sonnetcore5 libkf5sonnetui5 libkf5textwidgets-data libkf5textwidgets5
libkf5waylandclient5 libkf5waylandserver5 libkf5xmlgui-bin libkf5xmlgui-data libkf5xmlgui5 libkscreenlocker5 libkwin4-effect-builtins1 libkwineffects11 libkwinglutils11
libkwinxrenderutils11 libqgsttools-p1 libqt5multimedia5 libqt5multimedia5-plugins libqt5multimediaquick-p5 libqt5multimediawidgets5 libxcb-composite0 libxcb-cursor0 libxcb-damage0
os-prober python3-dbus.mainloop.pyqt5 python3-icu python3-pam python3-pyqt5 python3-pyqt5.qtsvg python3-pyqt5.qtwebkit python3-sip qml-module-org-kde-kquickcontrolsaddons
qml-module-qtmultimedia qml-module-qtquick2 rdate tasksel tasksel-data
Use ‘sudo apt autoremove’ to remove them.
The following NEW packages will be installed:
ros-melodic-velodyne-gazebo-plugins
0 upgraded, 1 newly installed, 0 to remove and 338 not upgraded.
Need to get 75.5 kB of archives.
After this operation, 479 kB of additional disk space will be used.
Err:1 Index of /ros/ubuntu/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror bionic/main arm64 ros-melodic-velodyne-gazebo-plugins arm64 1.0.12-1bionic.20220517.194444
404 Not Found [IP: 101.6.15.130 80]
E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-velodyne-gazebo-plugins/ros-melodic-velodyne-gazebo-plugins_1.0.12-1bionic.20220517.194444_arm64.deb 404 Not Found [IP: 101.6.15.130 80]
E: Unable to fetch some archives, maybe run apt-get update or try with --fix-missing?
ERROR: the following rosdeps failed to install
apt: command [sudo -H apt-get install -y ros-melodic-moveit-ros-planning-interface] failed
apt: command [sudo -H apt-get install -y ros-melodic-robotis-manipulator] failed
apt: command [sudo -H apt-get install -y ros-melodic-dynamixel-workbench-toolbox] failed
apt: command [sudo -H apt-get install -y ros-melodic-map-server] failed
apt: command [sudo -H apt-get install -y ros-melodic-move-base] failed
apt: command [sudo -H apt-get install -y ros-melodic-open-manipulator-msgs] failed
apt: command [sudo -H apt-get install -y ros-melodic-robot-upstart] failed
apt: command [sudo -H apt-get install -y ros-melodic-joy] failed
apt: command [sudo -H apt-get install -y ros-melodic-moveit-msgs] failed
apt: command [sudo -H apt-get install -y ros-melodic-moveit-core] failed
apt: command [sudo -H apt-get install -y ros-melodic-moveit-ros-planning] failed
apt: command [sudo -H apt-get install -y ros-melodic-moveit-ros-move-group] failed
apt: command [sudo -H apt-get install -y ros-melodic-moveit-fake-controller-manager] failed
apt: command [sudo -H apt-get install -y ros-melodic-moveit-kinematics] failed
apt: command [sudo -H apt-get install -y ros-melodic-moveit-planners-ompl] failed
apt: command [sudo -H apt-get install -y ros-melodic-moveit-ros-visualization] failed
apt: command [sudo -H apt-get install -y ros-melodic-moveit-setup-assistant] failed
apt: command [sudo -H apt-get install -y ros-melodic-moveit-simple-controller-manager] failed
apt: command [sudo -H apt-get install -y ros-melodic-joint-state-publisher-gui] failed
apt: command [sudo -H apt-get install -y ros-melodic-gmapping] failed
apt: command [sudo -H apt-get install -y ros-melodic-hector-mapping] failed
apt: command [sudo -H apt-get install -y ros-melodic-octomap-server] failed
apt: command [sudo -H apt-get install -y ros-melodic-global-planner] failed
apt: command [sudo -H apt-get install -y ros-melodic-navfn] failed
apt: command [sudo -H apt-get install -y ros-melodic-dwa-local-planner] failed
apt: command [sudo -H apt-get install -y ros-melodic-base-local-planner] failed
apt: command [sudo -H apt-get install -y ros-melodic-amcl] failed
apt: command [sudo -H apt-get install -y ros-melodic-pointcloud-to-laserscan] failed
apt: command [sudo -H apt-get install -y ros-melodic-rosserial-python] failed
apt: command [sudo -H apt-get install -y ros-melodic-robot-localization] failed
apt: command [sudo -H apt-get install -y ros-melodic-rosserial] failed
apt: command [sudo -H apt-get install -y ros-melodic-interactive-marker-twist-server] failed
apt: command [sudo -H apt-get install -y ros-melodic-teleop-twist-joy] failed
apt: command [sudo -H apt-get install -y ros-melodic-twist-mux] failed
apt: command [sudo -H apt-get install -y ros-melodic-ros-controllers] failed
apt: command [sudo -H apt-get install -y ros-melodic-hector-gazebo-plugins] failed
apt: command [sudo -H apt-get install -y ros-melodic-hector-sensors-description] failed
apt: command [sudo -H apt-get install -y ros-melodic-velodyne-gazebo-plugins] failed
apt: Failed to detect successful installation of [ros-melodic-moveit-ros-planning-interface]
apt: Failed to detect successful installation of [ros-melodic-robotis-manipulator]
apt: Failed to detect successful installation of [ros-melodic-dynamixel-workbench-toolbox]
apt: Failed to detect successful installation of [ros-melodic-map-server]
apt: Failed to detect successful installation of [ros-melodic-move-base]
apt: Failed to detect successful installation of [ros-melodic-open-manipulator-msgs]
apt: Failed to detect successful installation of [ros-melodic-robot-upstart]
apt: Failed to detect successful installation of [ros-melodic-joy]
apt: Failed to detect successful installation of [ros-melodic-moveit-msgs]
apt: Failed to detect successful installation of [ros-melodic-moveit-core]
apt: Failed to detect successful installation of [ros-melodic-moveit-ros-planning]
apt: Failed to detect successful installation of [ros-melodic-moveit-ros-move-group]
apt: Failed to detect successful installation of [ros-melodic-moveit-fake-controller-manager]
apt: Failed to detect successful installation of [ros-melodic-moveit-kinematics]
apt: Failed to detect successful installation of [ros-melodic-moveit-planners-ompl]
apt: Failed to detect successful installation of [ros-melodic-moveit-ros-visualization]
apt: Failed to detect successful installation of [ros-melodic-moveit-setup-assistant]
apt: Failed to detect successful installation of [ros-melodic-moveit-simple-controller-manager]
apt: Failed to detect successful installation of [ros-melodic-joint-state-publisher-gui]
apt: Failed to detect successful installation of [ros-melodic-gmapping]
apt: Failed to detect successful installation of [ros-melodic-hector-mapping]
apt: Failed to detect successful installation of [ros-melodic-octomap-server]
apt: Failed to detect successful installation of [ros-melodic-global-planner]
apt: Failed to detect successful installation of [ros-melodic-navfn]
apt: Failed to detect successful installation of [ros-melodic-dwa-local-planner]
apt: Failed to detect successful installation of [ros-melodic-base-local-planner]
apt: Failed to detect successful installation of [ros-melodic-amcl]
apt: Failed to detect successful installation of [ros-melodic-pointcloud-to-laserscan]
apt: Failed to detect successful installation of [ros-melodic-rosserial-python]
apt: Failed to detect successful installation of [ros-melodic-robot-localization]
apt: Failed to detect successful installation of [ros-melodic-rosserial]
apt: Failed to detect successful installation of [ros-melodic-interactive-marker-twist-server]
apt: Failed to detect successful installation of [ros-melodic-teleop-twist-joy]
apt: Failed to detect successful installation of [ros-melodic-twist-mux]
apt: Failed to detect successful installation of [ros-melodic-ros-controllers]
apt: Failed to detect successful installation of [ros-melodic-hector-gazebo-plugins]
apt: Failed to detect successful installation of [ros-melodic-hector-sensors-description]
apt: Failed to detect successful installation of [ros-melodic-velodyne-gazebo-plugins]
Do you think it is related to the university internet? or something else?
@Sohail
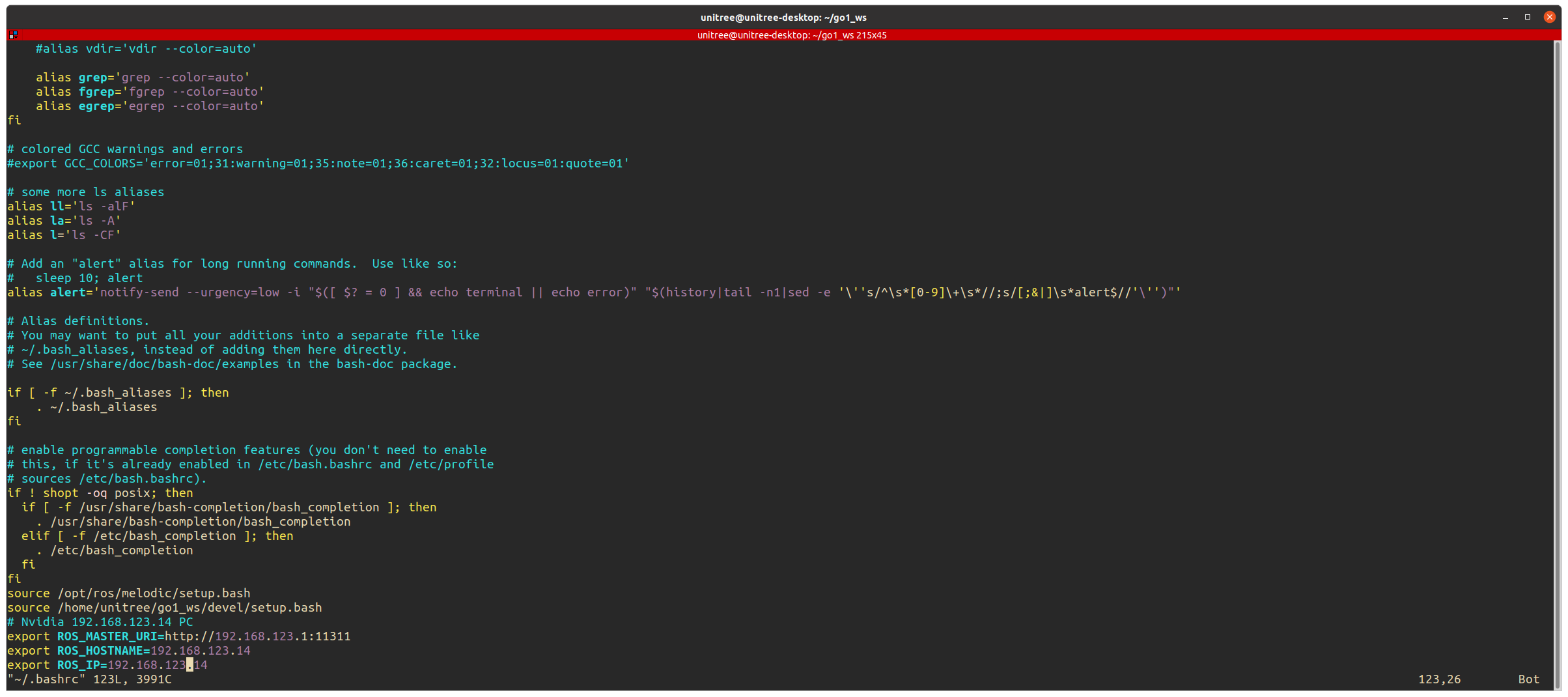
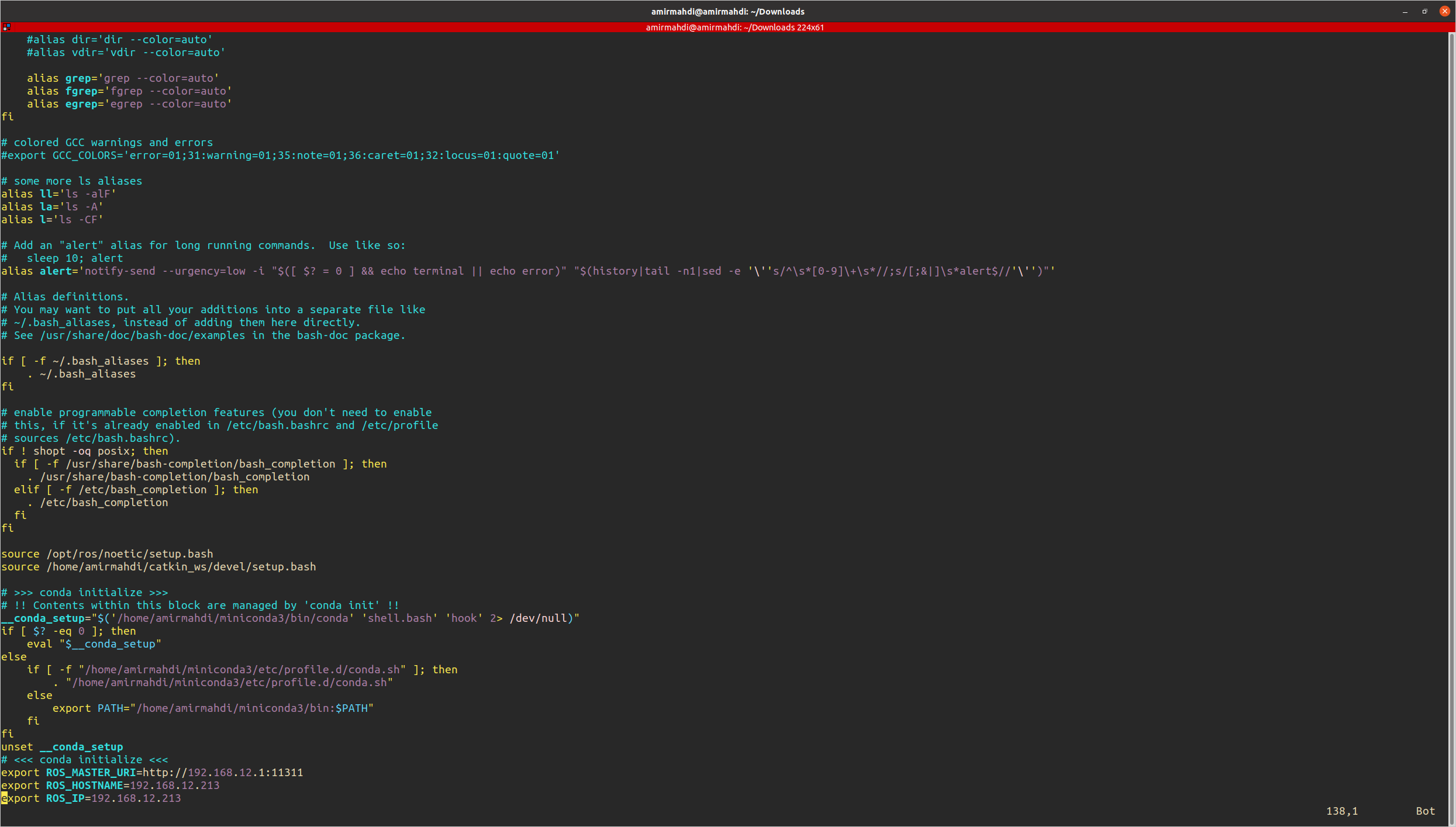
I have set up the ROS multimachine between my PC and the head. (I have connected to GO1 wifi, and my laptop IP ends with 192.168.123..213 ). Please check these screenshots:
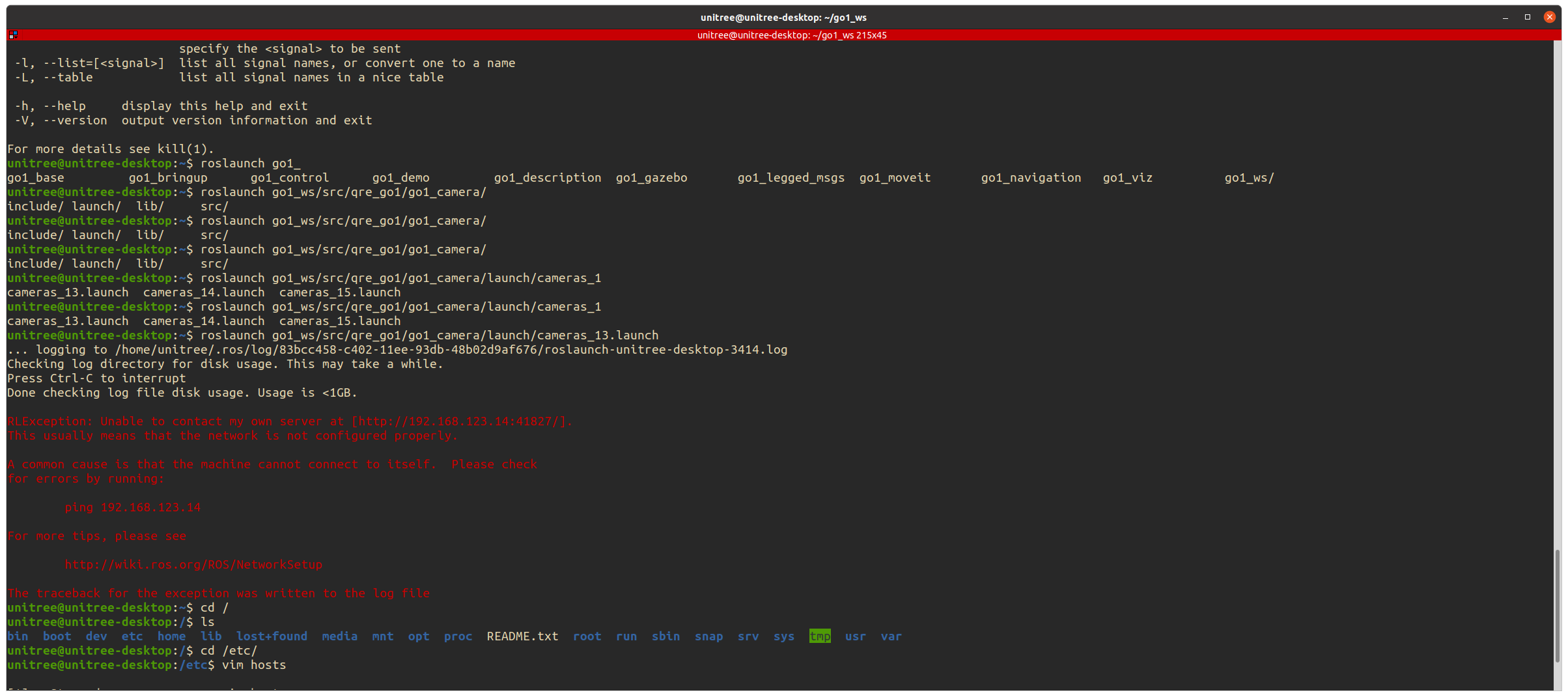
unitree@unitree-desktop:~$ roslaunch go1_camera cameras_13.launch
… logging to /home/unitree/.ros/log/36062ea6-c4d0-11ee-a853-48b02d9af676/roslaunch-unitree-desktop-24730.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
RLException: Unable to contact my own server at [http://192.168.123.14:34565/].
This usually means that the network is not configured properly.
A common cause is that the machine cannot connect to itself. Please check
for errors by running:
ping 192.168.123.14
For more tips, please see
http://wiki.ros.org/ROS/NetworkSetup
The traceback for the exception was written to the log file.
I only want to have access to the camera at the moment. Why is this error mentioning
RLException: Unable to contact my own server at [http://192.168.123.14:34565/].
In my previous replies, I shared three photos from bashrc regarding the mulitimachine setup.
Yes, your ROS multimachine setup is incorrect.
Could you please let me know which rostopic is related to the front camera? And which format is okay (camera/front/image or camera/front/image/compressed, etc.? @Sohail
Please also update your GitHub for the camera sections. It is not well written for students with basic information about ROS and the challenges I encountered during the past few days. @Azib