Yup. I put this on the front camera nano:
But the main pc part which I assume needs to go in the bashrc on my laptop doesn’t work which is this part:
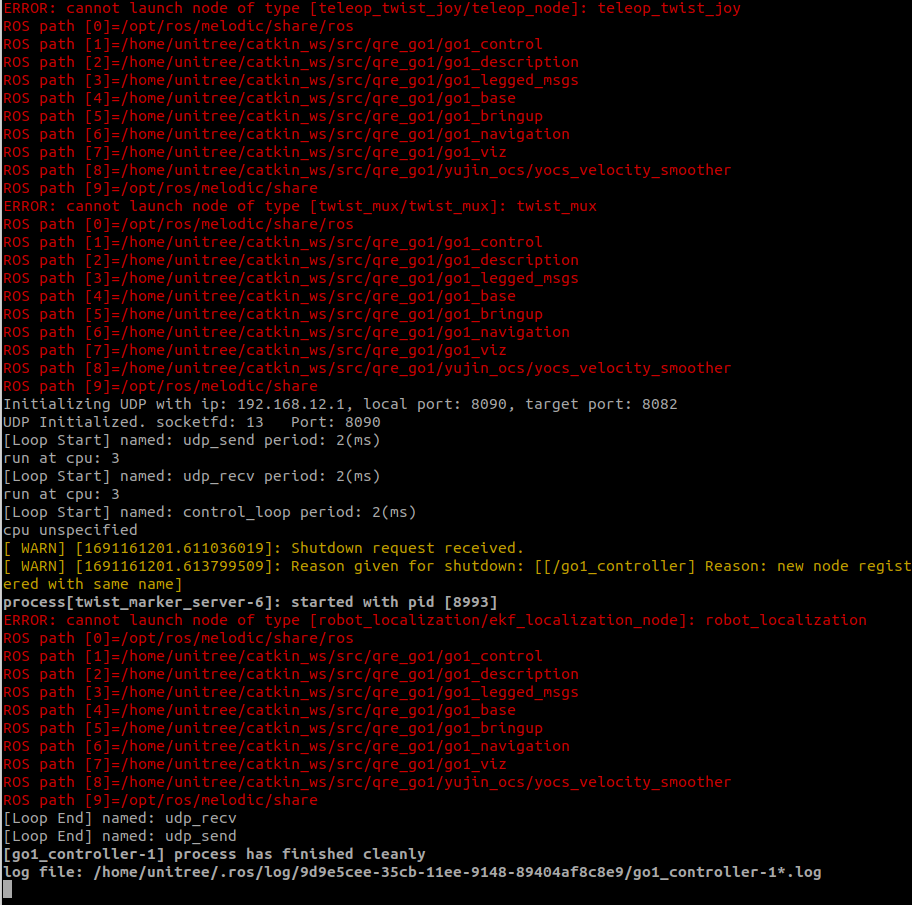
. Because of this I get another error on the nano when launching the bringup.launch on the nano:
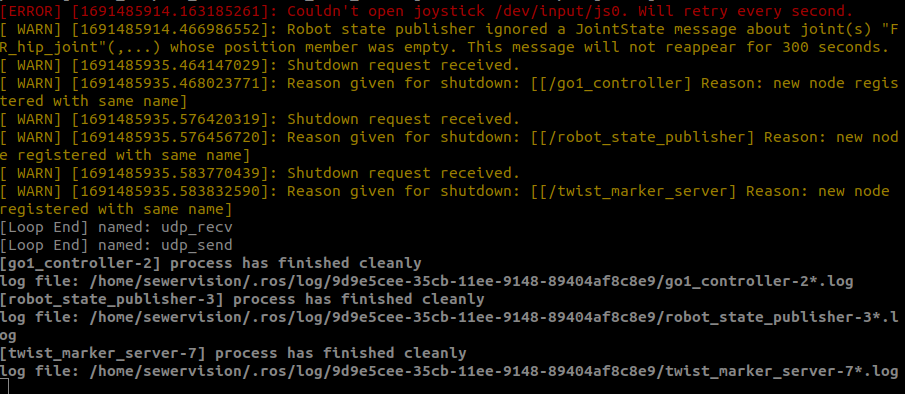
Yes, ROS is installed. I set 192.168.123.1 as static ip adress for the ethernet connection to the go1. Then just run the bringup.launch on both the laptop and the nano? Because I did this, but the nodes are conflicting with each other.
laptop:
So just roslaunch go1_camera cameras_13.launch on the nano(front & chin camera 192.168.123.13) and run bringup.launch on the laptop on which I want to receive the videostream?