Hi Kenneth,
Have you configured the go1_base packages launch file base.launch to the WiFi settings? Also, are you able to move the robot via teleop?

Hi Kenneth,
Have you configured the go1_base packages launch file base.launch to the WiFi settings? Also, are you able to move the robot via teleop?
Hi Sohail,
I can move the robot via teleop, but I’ve not edited the wifi settings. The warning message is now gone except for this error:
Hi Kenneth,
Glad to hear its working, that error is because a joystick is not connected and can be safely ignored. If you do not plan to use a joystick, you can comment out the include file from the go1_control.
As for the camera, please follow the README.md in the main GitHub page of the GO1 that we have provided. It requires ROS multimachine to function. Basically, you would have to run the ROS driver in each of the Nvidia so that they can publish the image, then receive it in your main PC to then perform your operations.
Yes thx. I have done that, but the bringup.launch is now no longer working. It doesn’t give any error, but it doesn’t do anything when I run it. It just stays like this:
I think I did something wrong with the nvidea connection in bashrc.
Dear Kenneth,
You have to put each of the ROS URI etc. in each of the Nvidia boards respectively and not all in one .bashrc file.
The first one is correct however, for the other 3 they must be placed in the different boards. Moreover, you have to install ROS into each of them and clone our repository and run the GO1_camera drivers for each of them.
Ok I see. The Go1 is running ROS Melodic already, tho I’m using ROS Noetic on my laptop. Will that cause any issues you think?
Is there a way to safely update Go1s ROS Melodic to ROS Noetic? I don’t want to break anything. BTW thank y’all for the help so far, I really appreciate it.
Hi Kenneth,
ROS melodic and ROS noetic messages should be compatible with each other so that should not be an issue. ROS are usually tied to Ubuntu versions such as Melodic for Ubuntu 18, Noetic for Ubunto 20, etc. Although possible to use one in the other, most likely things will break if you try to install noetic in Ubuntu 18.
I would highly warn not to modify/update the GO1 Nvidia boards to a higher OS as it might break the existing system if you are not an “expert” in their system.
Going forward, I advise let them remain as Melodic, clone the Github repository, disable auto-start of the camera from the start menu, and launch the camera drivers.
So after I do this, will there be a topic I can subscribe to so I can show the camera views on a PyQt GUI screen for example?
Yes, once everything is setup using any interface such as pyqt, roswebtools, rviz, etc. you should be able to view the camera stream.
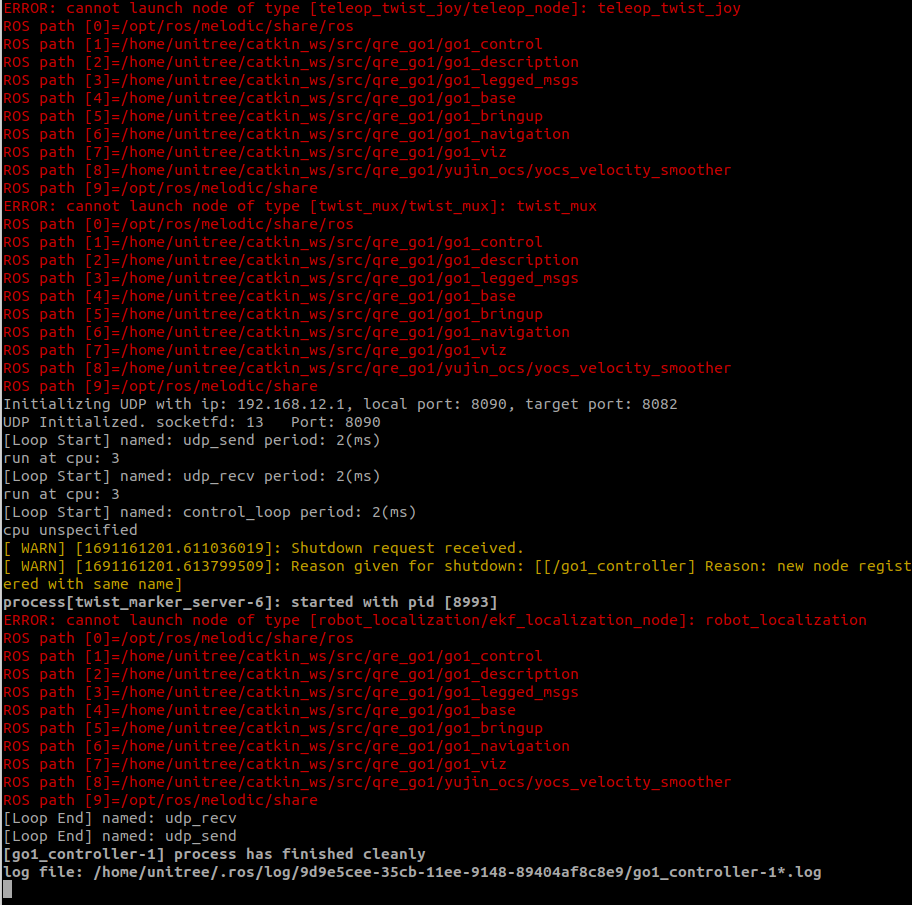
I installed the qre workspace on one of the nvideas. The one for the front camera. When I run it with bringup.launch I get this error again tho. I installed it only on one nano to test if it works.
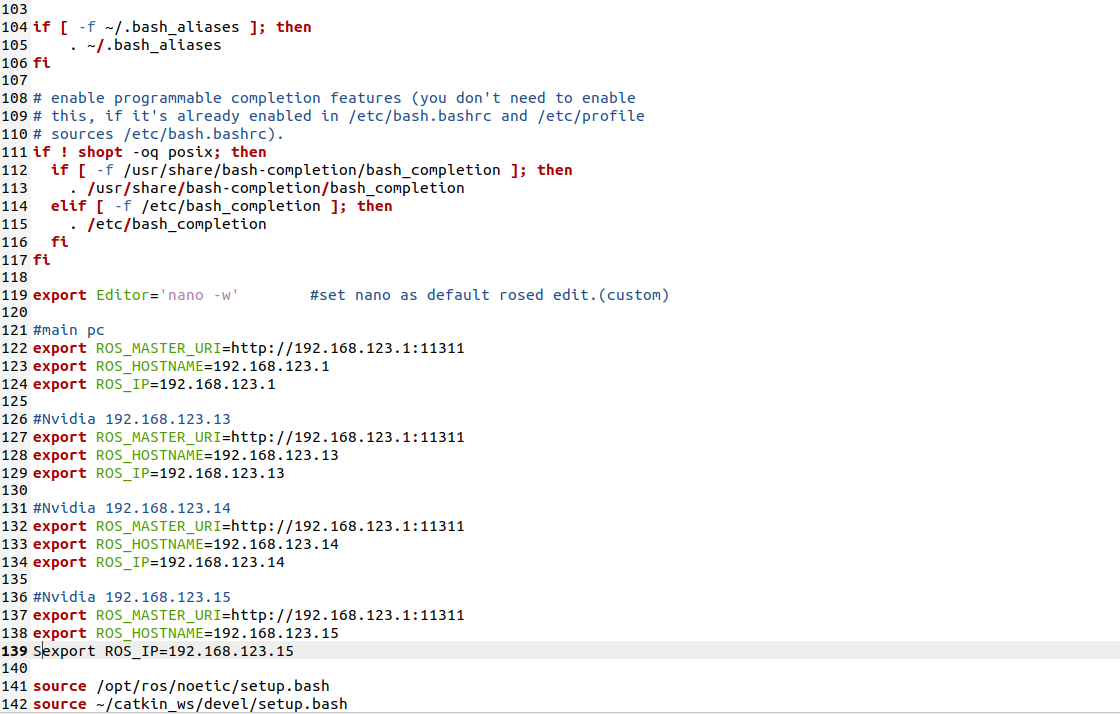
Yes. It seems to be on the pc side tho when adding this to .bashrc:

You have to put each IP accordingly for example on nano with up 192.168.123.13, you have to put the corresponding code in the bashrc
# Nvidia 192.168.123.13 PC
export ROS_MASTER_URI=http://192.168.123.1:11311
export ROS_HOSTNAME=192.168.123.13
export ROS_IP=192.168.123.13
and not the others. So for each corresponding PC get their own segment!
Yup. I put this on the front camera nano:
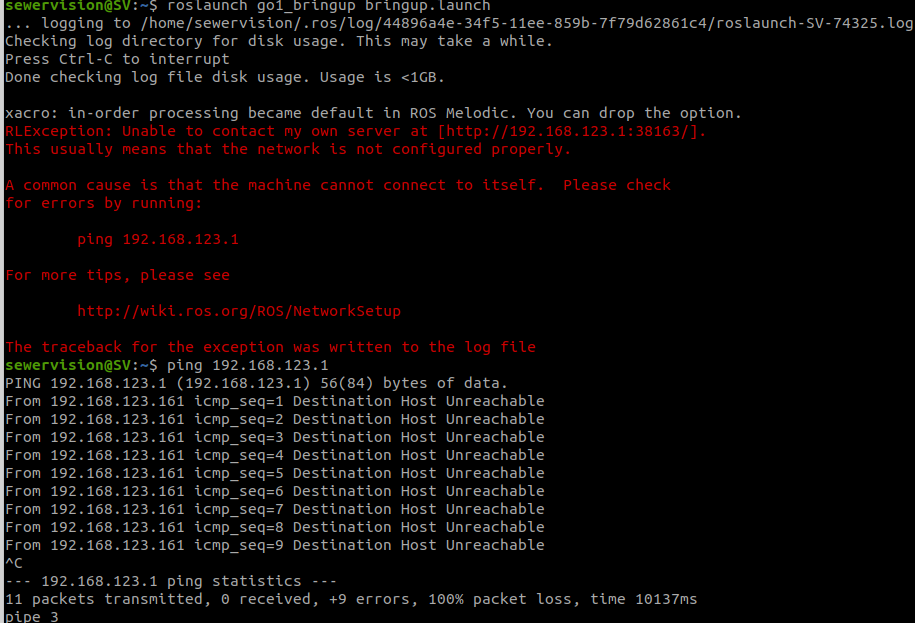
But the main pc part which I assume needs to go in the bashrc on my laptop doesn’t work which is this part:

. Because of this I get another error on the nano when launching the bringup.launch on the nano:
Does your PC have ROS installed, and also is the connection to the GO1 via ethernet cable with the IP 192.168.123.1?
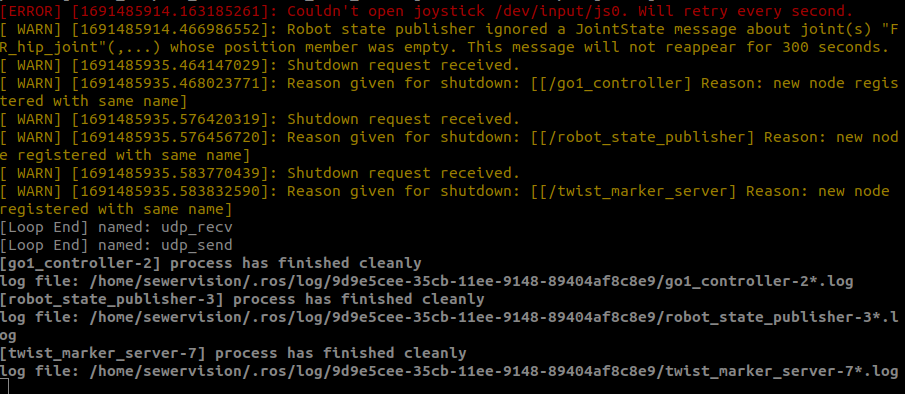
Yes, ROS is installed. I set 192.168.123.1 as static ip adress for the ethernet connection to the go1. Then just run the bringup.launch on both the laptop and the nano? Because I did this, but the nodes are conflicting with each other.
laptop:
What are you running on the nano? You are supposed to run the camera drivers only in the nanos!
So just roslaunch go1_camera cameras_13.launch on the nano(front & chin camera 192.168.123.13) and run bringup.launch on the laptop on which I want to receive the videostream?
The stream will come to the main PC which would be having the 192.168.123.1 IP i.e. your laptop, you can visualize via RVIZ.