
We have a Unitree Go1 which is failing to power on. A full description of the problem is as follows:
Symptoms
-
A test was underway involving a rotational jump starting in the prone position (lying down). The video of the test in question is shown here.
Upon the landing phase of the test, the robot suddenly shut down. -
After the test, the robot was put on the ground and powered on again. The robot stood up, and then was put in the prone position by holding L2+A twice, followed by L2+B and the L1+L2+start to put it in LOW LEVEL control mode. Sometime during this procedure, the robot powered off again.
-
Further attempts at powering back on with the battery have been unsuccessful. We have also tried an external power supply. When using the external power supply in constant voltage mode of 24V, the supply instantly goes into an error state, and it cannot supply enough current to maintain a 24V output.
-
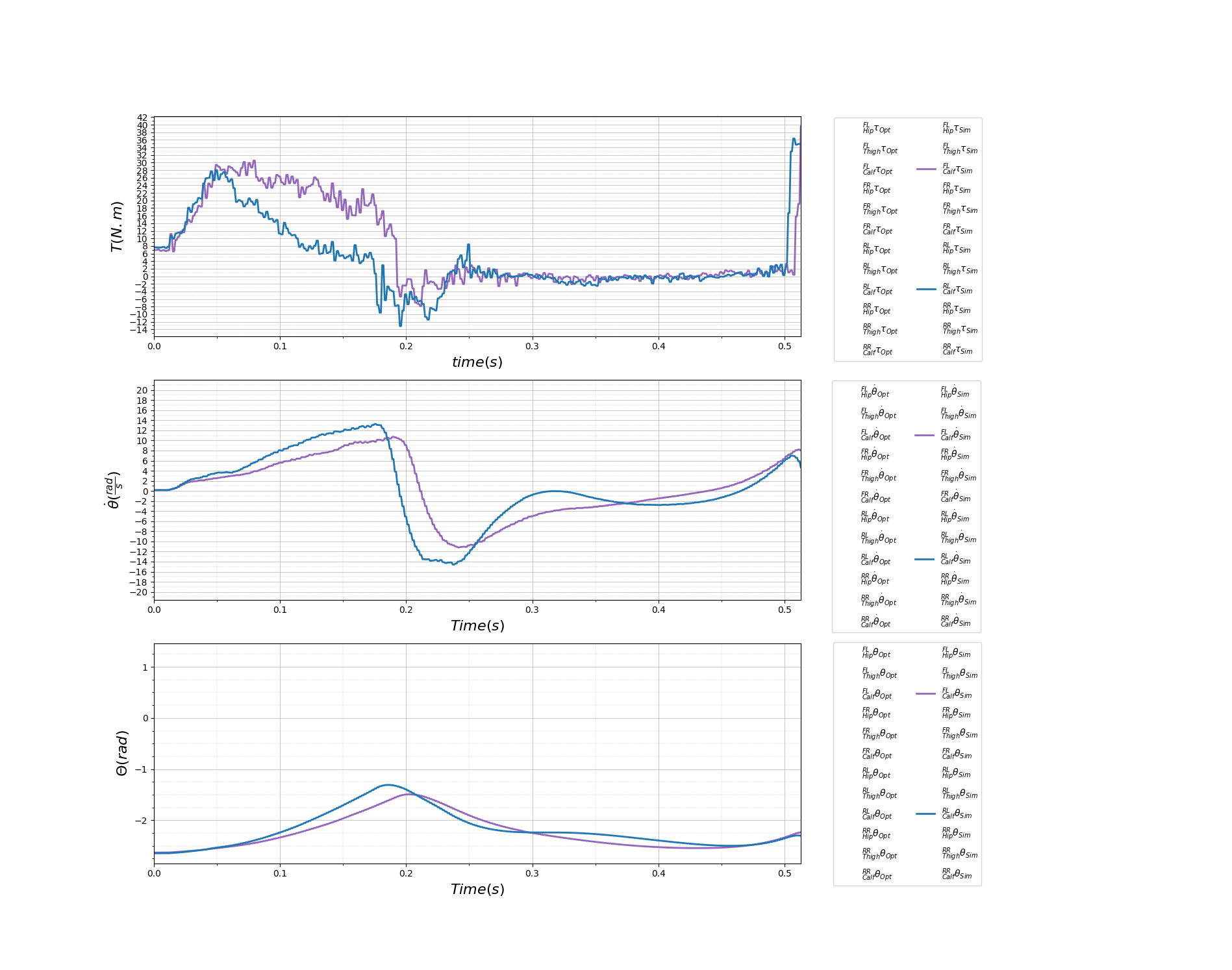
The torque, velocity, and position for the left front and rear calf joints is shown during the jump test. As can be seen, the commanded torques become quite large at the end and violate the 35.5 Nm limit"
Has anyone encountered this issue before, and are there any ways to fix it?
