

Oh yes…
Dear Alex,
Have you run the kill script for the camera before running the driver?
Also for renabling is the same procedure as disabling.
Okay thats fixing my problems with the ros-driver.
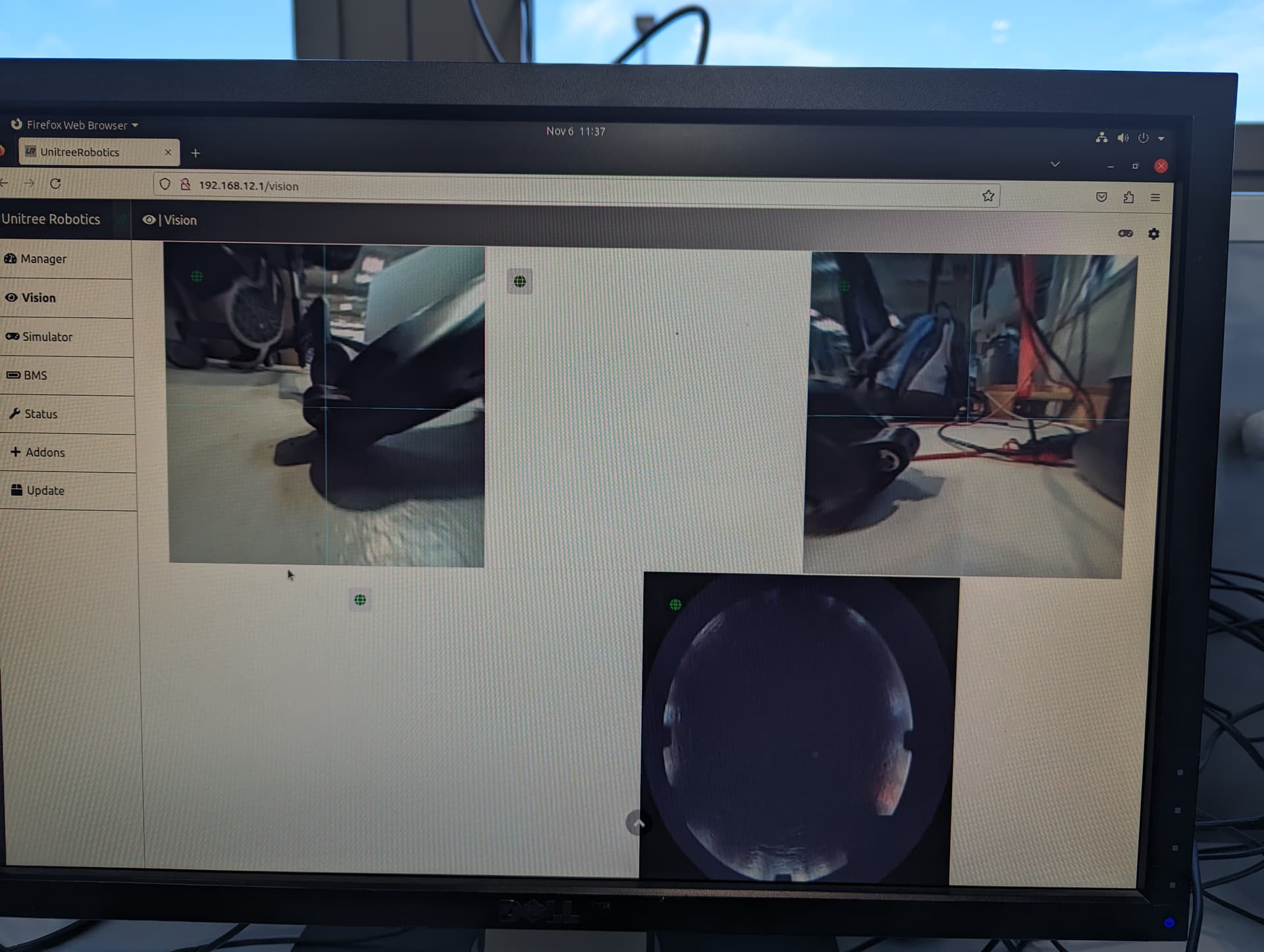
The only problem thats left is, that i cant access the Nano-Board for The face and chin camera. If im trying to ssh into the 192.168.123.13 board it says “no route to host” and as far as i know, there are no interfaces on the robot to connect a Monitor via HDMI.
These are all connections to the RaspberryPi
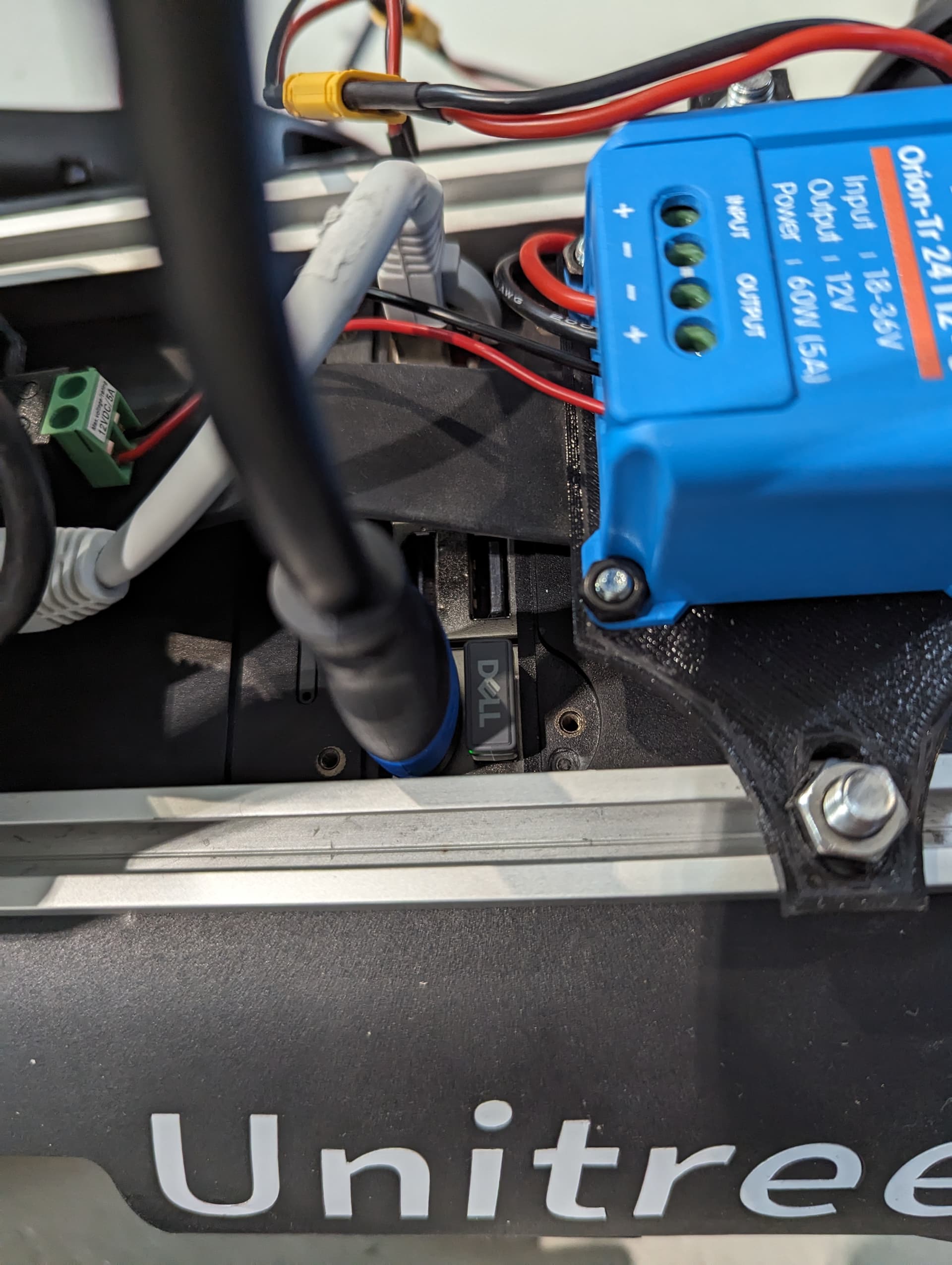
And these interface are just for the 192.168.123.14 and .15 Nano-Board.
So how can i get access to the 192.168.123.13 Board to enable/disable the camera and install the rosdrivers?
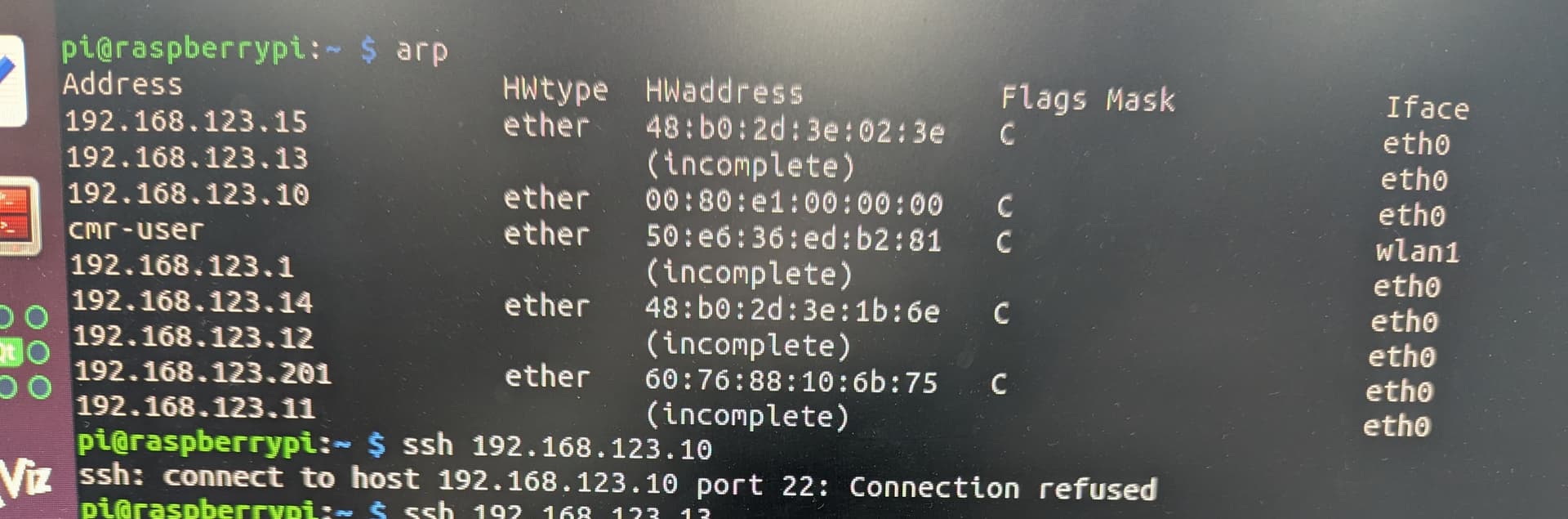
It seems at some point you disabled the local interface and put it in dhcp, it seems from the pictures that it might be the 203 one/
I should’ve told you before … i’ve connected a LiDAR-Scanner, who’s the 192.168.123.201 one.
After a restart the connection was back there and i could ping the Board, but there is no possibility to connect that Board with HDMI?
Unfortunately, not if I recall correctly, one of the boards did not have an HDMI port connection. For that most likely you would have to open the GO1, instead I would recommend using the command line interface (CLI)
Thats unlucky, because i think that nano board has a problem like a loose contact or similar. Sometimes the connection to the board it there like its intended and sometimes i cant reach the board. But unfortunately i cant go on the board to check that properly.
Hmm if the network access is not accessible at all times then there must be an issue with the network settings.
The network access is sometimes accessable and sometimes not and i cant see any reason for that. And when im connected the access gets lost after a while and sometimes it comes up again instantly, but sometimes just after a few restarts.
For me it looks like a loose contact but thats just blind guessing.