
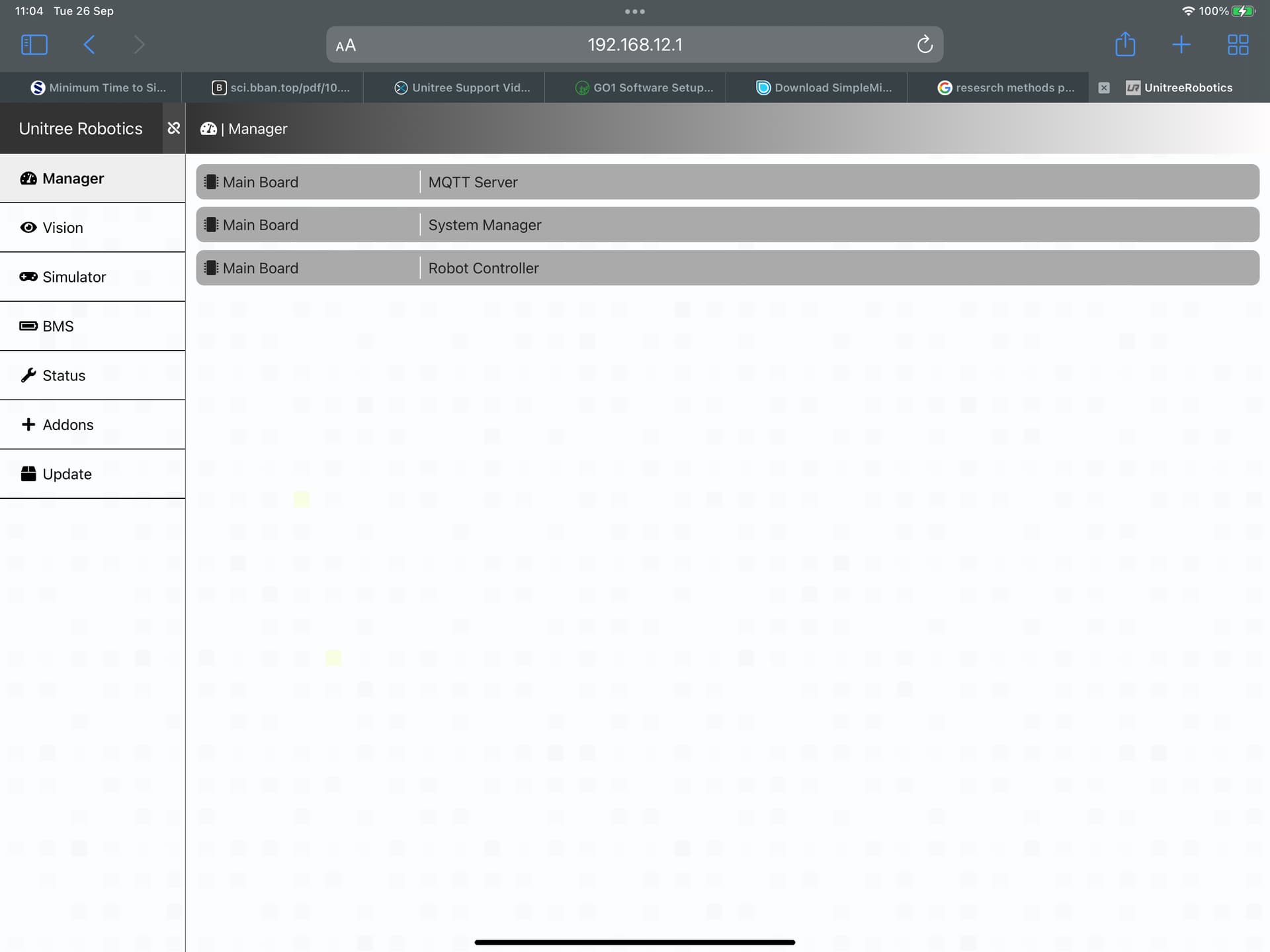
I actually have this problem, pretty much aligned with the topic: for some reason I don’t see the mqtt server, the system manager, robot controller appear gray faded, even if I am connected to the raspberry pi 192.168.12.1. It was working before and dog was only used for demo purposes. Do you know what problem it could be? For instance I have tried different devices, they all cannot retrieve data from the robot (although connected to the raspberry pi).
Was it working before? Also do you have a slack email it should work if you have a registered slack email!
I have a registered slack email but it says I can only access the group if from unitree.cc or u.northwestern.edu.
About the robot: it was working just fine before. I can ping all microcontrollers. Remote works normally. But go1 app does not work anymore and browser opens the page but the 3 icons are not blue, but gray and no info about anything is shown.
If the GO1 is being controlled then it should be fine as there is a difference in each firmware version, some remain greyed out, and is the default behavior. The app not working is probably because some network settings were changed or possibly because the GO1 was turned off abruptly (battery finished).
I will try and contact the Slack administrator and see if he can provide an invitation.
Hi. But they were all blue before, and now they are all gray. And I truly believe this is why I cannot access any information (temp of the motors, battery charge, etc.). I had this info one week ago. And things were blue. I was wondering if there is a factory reset, or hard reset. This is not network as I accessed the platform through 192.168.12.1 using cellphone and different computer, they are all the same. Thanks in advance for your help.
The new link for joining slack.
Also, the connection issue seems to be resolved by reflashing the pi image. A resource provided by the courtesy of the community (i.e. TheDogPound slack group).
Hi guys… Does any can help me? Here is my problem:
My robot, GO1, is turned on successfully and I am controlling it with a joystick; however, I have a few problems with ROS topics. When I write rostopic list, the terminal shows these:
/camera1/point_cloud_face
/camera1/range_visual_face
/camera2/point_cloud_chin
/camera3/range_visual_left
/camera4/point_cloud_right
/camera4/range_visual_right
/camera5/point_cloud_rearDown
/cmd_odom
/cmd_vel
/cmd_vel_2
/joint_states
/lcm_node/obs_env
/lcm_node/ultrasonic_env
/map
/move_base/cancel
/move_base/feedback
/move_base/goal
/move_base/result
/move_base/status
/move_base_simple/goal
/odom
/pointcloud_process/ground_pointcloud
/range_front
/range_left
/range_right
/range_ultrasonic_face
/range_ultrasonic_left
/range_ultrasonic_right
/ros2udp/odom
/ros2udp_motion_mode_adv/joystick
/rosout
/rosout_agg
/scan
/slam_planner_node/DBLocalPlannerROS/global_plan
/slam_planner_node/DBLocalPlannerROS/local_plan
/slam_planner_node/DBLocalPlannerROS/obstacles
/slam_planner_node/DBLocalPlannerROS/parameter_descriptions
/slam_planner_node/DBLocalPlannerROS/parameter_updates
/slam_planner_node/DBLocalPlannerROS/teb_feedback
/slam_planner_node/DBLocalPlannerROS/teb_markers
/slam_planner_node/DBLocalPlannerROS/teb_poses
/slam_planner_node/DBLocalPlannerROS/via_points
/slam_planner_node/GlobalPlanner/parameter_descriptions
/slam_planner_node/GlobalPlanner/parameter_updates
/slam_planner_node/GlobalPlanner/plan
/slam_planner_node/GlobalPlanner/potential
/slam_planner_node/current_goal
/slam_planner_node/global_costmap/costmap
/slam_planner_node/global_costmap/costmap_updates
/slam_planner_node/global_costmap/footprint
/slam_planner_node/global_costmap/inflation_layer/parameter_descriptions
/slam_planner_node/global_costmap/inflation_layer/parameter_updates
/slam_planner_node/global_costmap/obstacle_layer/clearing_endpoints
/slam_planner_node/global_costmap/obstacle_layer/parameter_descriptions
/slam_planner_node/global_costmap/obstacle_layer/parameter_updates
/slam_planner_node/global_costmap/parameter_descriptions
/slam_planner_node/global_costmap/parameter_updates
/slam_planner_node/global_costmap/static_layer/parameter_descriptions
/slam_planner_node/global_costmap/static_layer/parameter_updates
/slam_planner_node/local_costmap/costmap
/slam_planner_node/local_costmap/costmap_updates
/slam_planner_node/local_costmap/footprint
/slam_planner_node/local_costmap/obstacle_layer/parameter_descriptions
/slam_planner_node/local_costmap/obstacle_layer/parameter_updates
/slam_planner_node/local_costmap/parameter_descriptions
/slam_planner_node/local_costmap/parameter_updates
/slam_planner_node/local_costmap/static_layer/parameter_descriptions
/slam_planner_node/local_costmap/static_layer/parameter_updates
/slam_planner_node/parameter_descriptions
/slam_planner_node/parameter_updates
/slamware_ros_sdk_server_node/add_line
/slamware_ros_sdk_server_node/add_lines
/slamware_ros_sdk_server_node/basic_sensors_info
/slamware_ros_sdk_server_node/basic_sensors_values
/slamware_ros_sdk_server_node/cancel_action
/slamware_ros_sdk_server_node/clear_lines
/slamware_ros_sdk_server_node/clear_map
/slamware_ros_sdk_server_node/global_plan_path
/slamware_ros_sdk_server_node/go_home
/slamware_ros_sdk_server_node/map_metadata
/slamware_ros_sdk_server_node/move_by_direction
/slamware_ros_sdk_server_node/move_by_theta
/slamware_ros_sdk_server_node/move_line
/slamware_ros_sdk_server_node/move_lines
/slamware_ros_sdk_server_node/move_to
/slamware_ros_sdk_server_node/move_to_locations
/slamware_ros_sdk_server_node/recover_localization
/slamware_ros_sdk_server_node/remove_line
/slamware_ros_sdk_server_node/robot_basic_state
/slamware_ros_sdk_server_node/robot_device_info
/slamware_ros_sdk_server_node/rotate
/slamware_ros_sdk_server_node/rotate_to
/slamware_ros_sdk_server_node/set_map_localization
/slamware_ros_sdk_server_node/set_map_update
/slamware_ros_sdk_server_node/set_pose
/slamware_ros_sdk_server_node/sync_map
/slamware_ros_sdk_server_node/virtual_tracks
/slamware_ros_sdk_server_node/virtual_walls
/tf
/tf_static
/ukd_triple/pose
/ukd_triple/state
/ukd_triple_2_goal/path_tag_line
/ukd_triple_2_goal/path_tag_window
Question 1: all the topics that are shown here are correct? Nothing is missing, right? Because I need to make sure that if any topics are missing, I should install the related packages (How can I do that?)
Question 2: When I run rostopic echo \cmd_odom (or /cmd_odom or /cmd_vel or /cmd_vel_2 or /joint_states or some other topics), the terminal does not show anything to me. I don’t how I can see or access these values. Why is this happening?
Question 3: When the robot is turned on and it is walking with a joystick, I run rostopic echo \odom I see this:
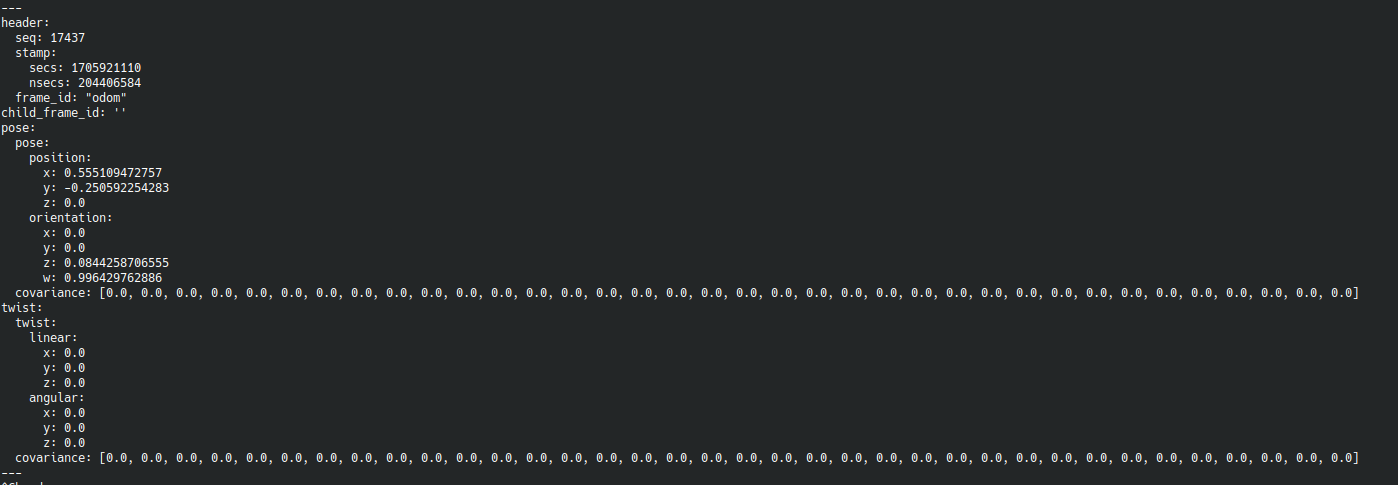
Why does the value of twist is 0 when the robot is walking or rotating 90 or 180 degrees? These should change, right? If yes, how I can fix this?
Sorry, i am having a very similar problem with my Unitree Go1 robot. But I dont inderstand how to procceed with these steps, because nmuti is not installed in the raspberry pi.
I would really appreciate some assistance with this issue.
Thank you.