
I have connected go1 and pc through the go1 hotspot. Therefore, I changed the target_ip address in base.launch to 192.168.12.1. When I run roslaunch go1_bringup bringup.launch, the following warning appears: “Warning: TF_REPEATED_DATA ignoring data with redundant timestamp for frame base_link (parent uodom) at time 1710400859.798846 according to authority unknown_publisher at line 278 in /tmp/binarydeb/ros-noetic-tf2-0.7.7/src/buffer_core.cpp” And the tf tree shows odom and base linked in a closed loop shape.
Also, while running bringup.launch, when I execute roslaunch go1_navigation map_navi.launch, the terminal running bringup.launch displays: “[ WARN] [1710403121.543052578]: Shutdown request received. [ WARN] [1710403121.717672192]: Reason given for shutdown: [new node registered with same name] [local_ekf/ekf_localization_with_odom-7] process has finished cleanly log file: /root/.ros/log/511674f0-e1cf-11ee-902b-e45f01b73e01/local_ekf-ekf_localization_with_odom-7*.log” It seems that bringup.launch stops working after this log is printed. And even though map_navi.launch is running, the map does not appear in the tf tree. I have changed the path to my previously created map file in the following three files:
- custom_map_server.launch.xml
- empty_map_server.launch.xml
- map_server.launch.xml (default path was “$(find go1_navigation)/maps/office_240307.yaml”)
The guide said to run bringup.launch before executing map_navi.launch for navigation, but what could be the problem?
The folder tree is as follows:
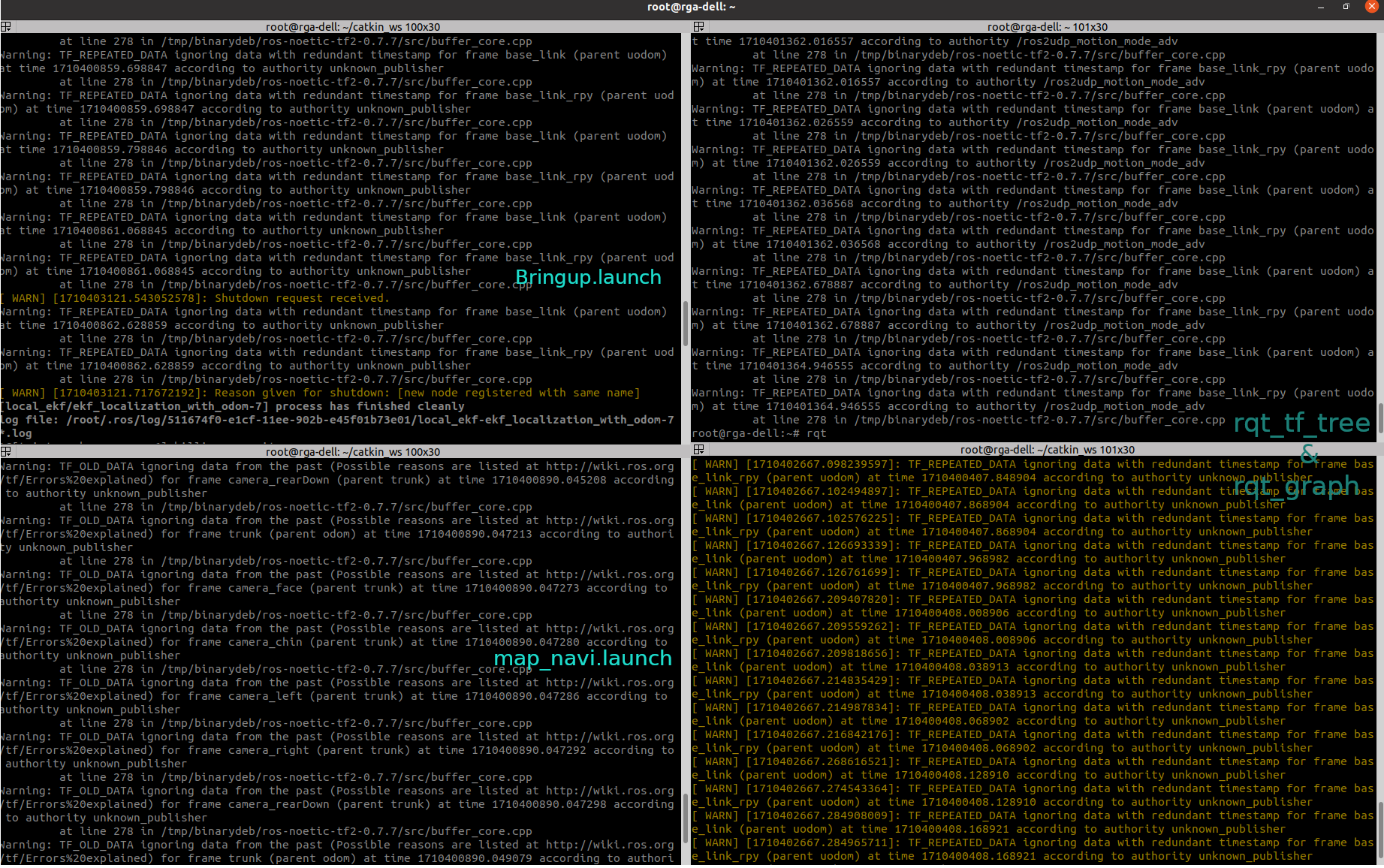
The bringup.launch tf tree is as follows:

The map_navi.launch tf tree is as follows:
