
Hello,
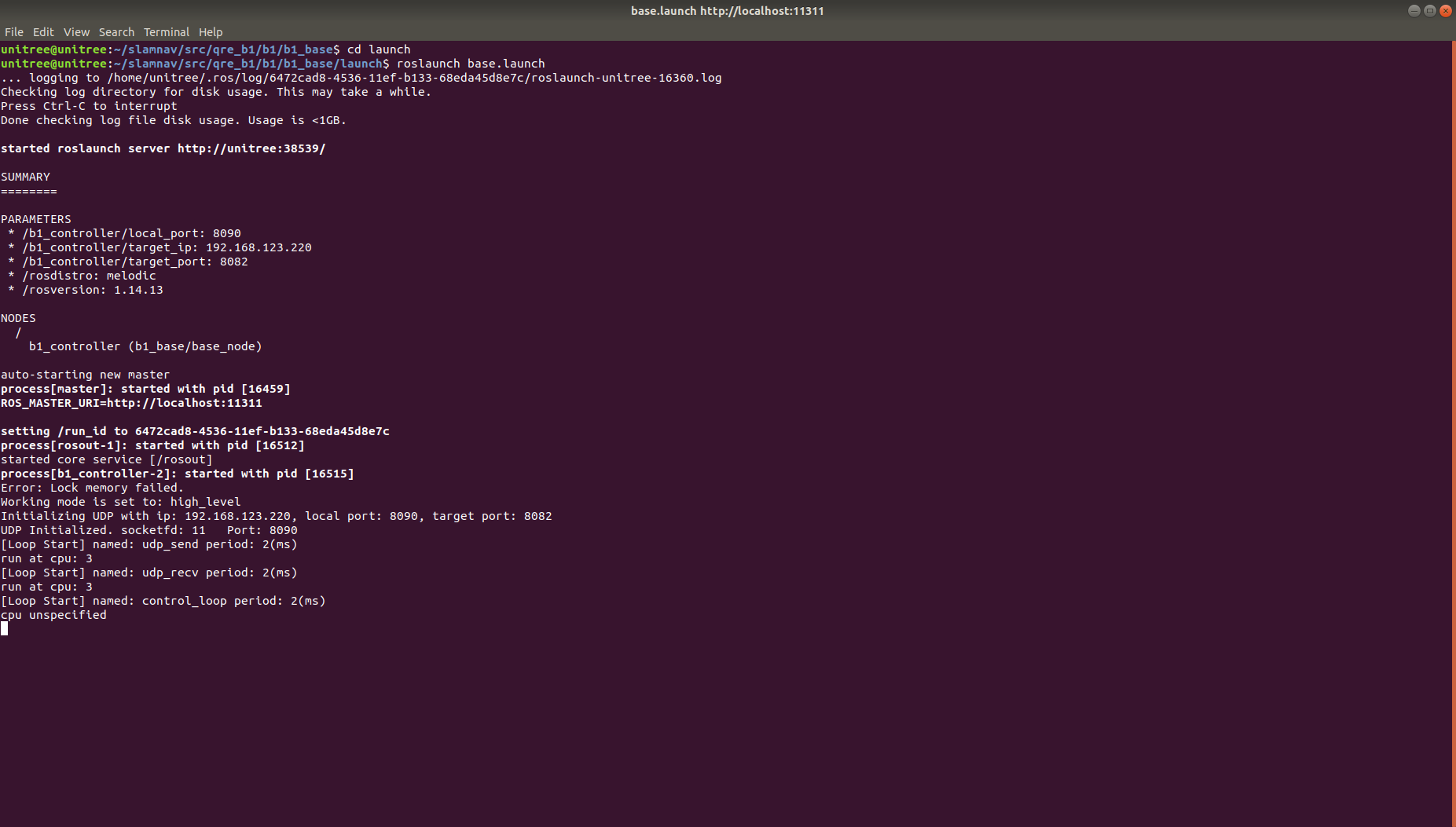
I am trying to send the navigation goals for B1 from RVIZ but i am not able to do so. I am using qre_b1 package and robosense lidar sdk. When i launch b1_base base.launch it says cpu unspecified at the end as seen in the terminal. and when this base.launch is launched i cannot move the robot even using the joystick (Only up and down possible). Could you suggest any way to send the navigation goals and explain why am i not able to move the robot please?
Dear @bishu,
This is not an issue an part of the unitree SDK.
Always launch the b1_bringup instead. Base only starts the driver.
Launch bringup, lidar, and odom/map ma navigation. Ensure all files in navi are configured.
You are missing the joint_state_publisher_gui ros package. Install it via sudo apt-get install ros-melodic-joint-state-publisher-gui -y
1 Like
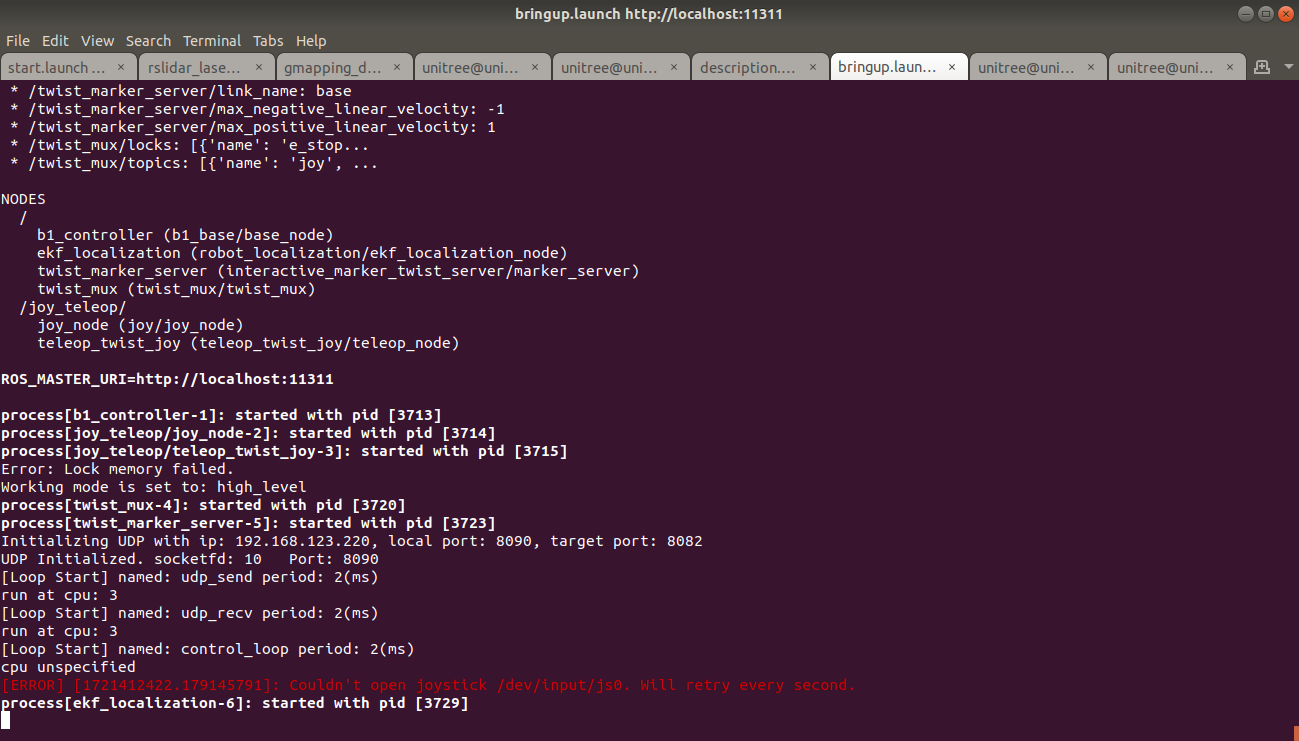
Thankyou! I tried to do what you mention. I installed all necessary package including joint state publisher and teleop packages. Even using b1_bringup.launch, I am not able to move the robot either with joystick or RVIZ (Still only up and down possible( L2+A/start)) . I noticed this b1_bringup is also launching b1_base which is making this problem as i mentioned earlier. Do you think this joystick error when launching b1_bringup has anything to do with this?
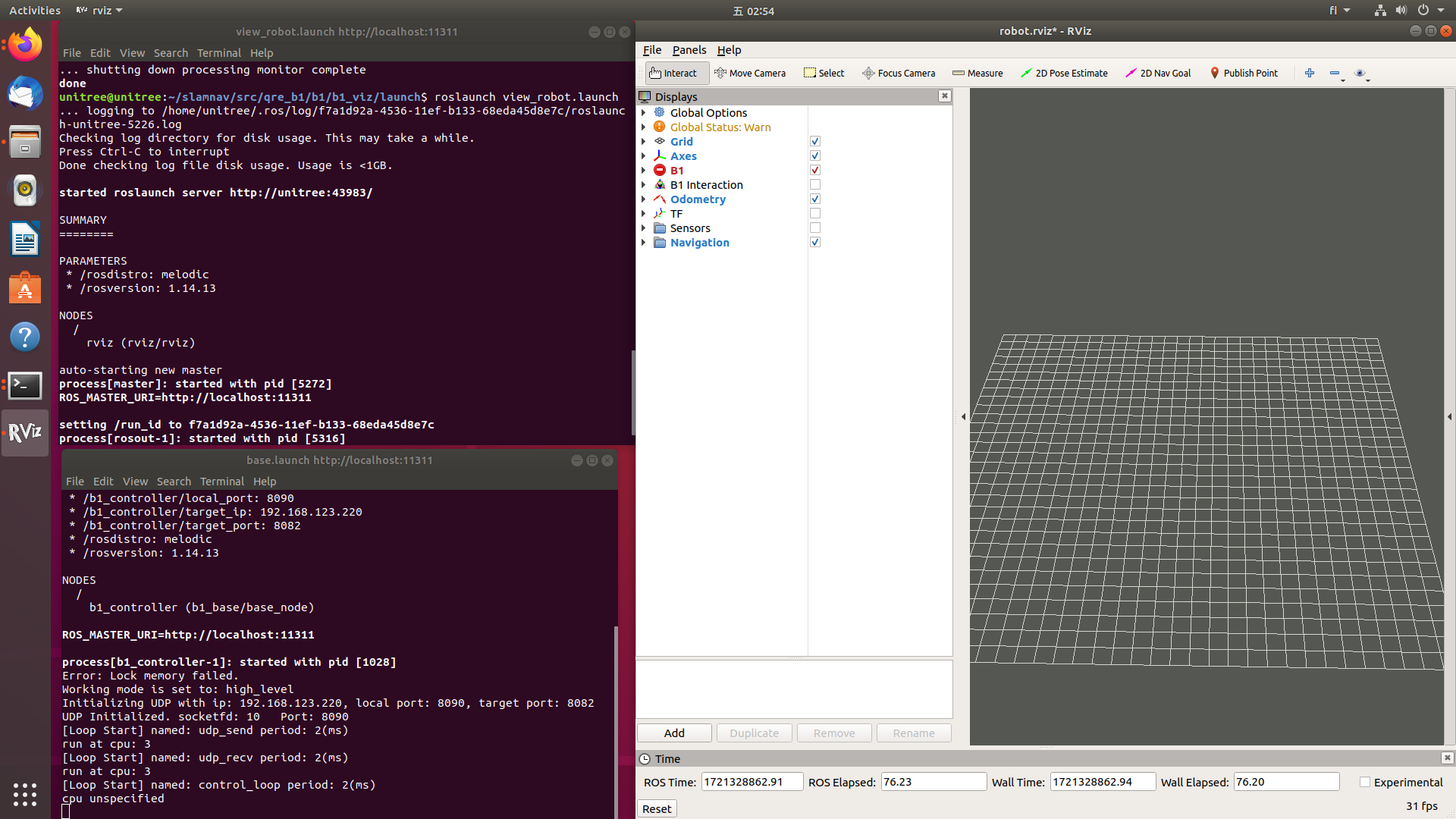
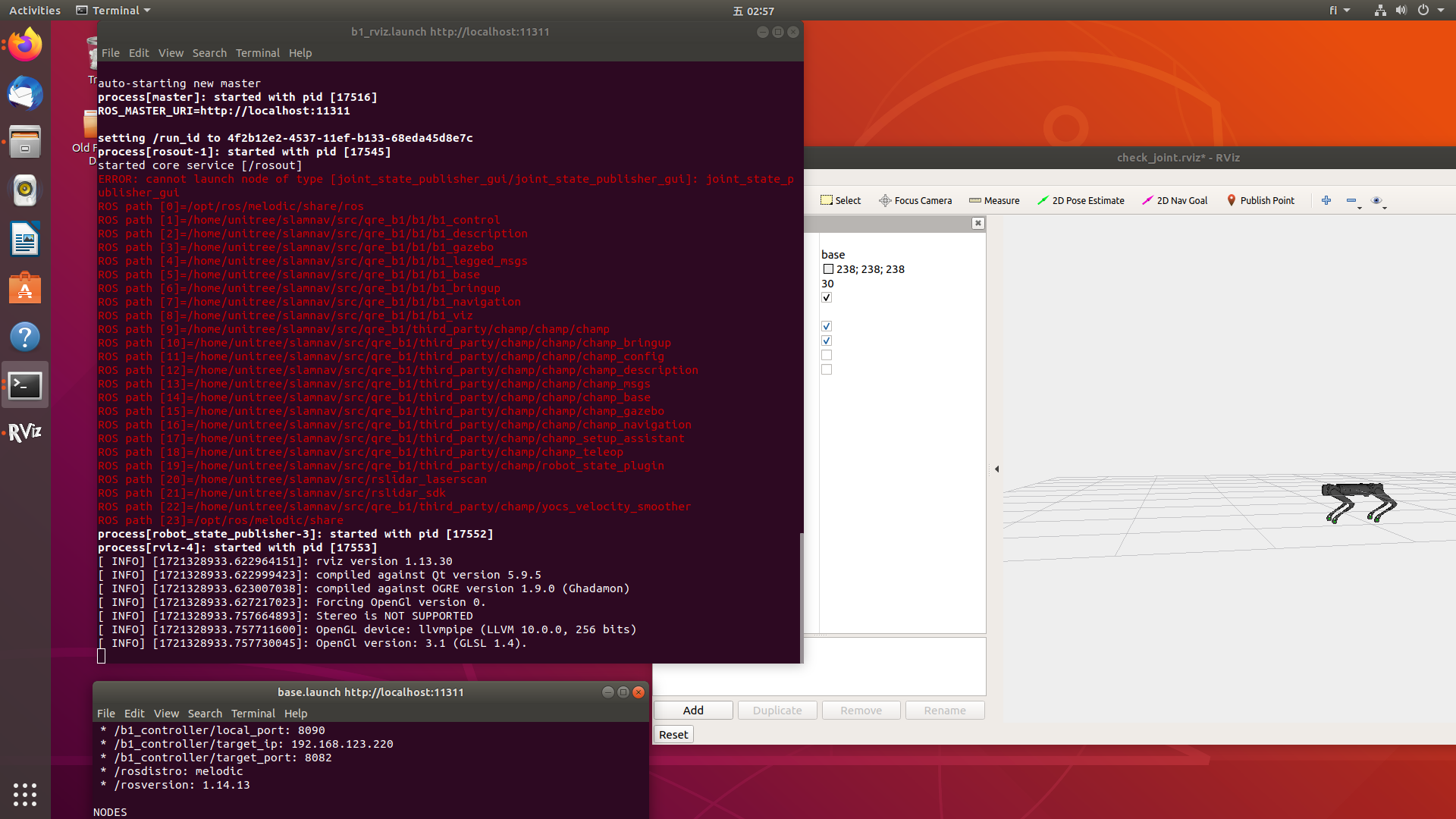
When i try to visualize in RVIZ: It is not able to find b1_description package although the path is same as for b1_controller and other stuff of b1 package but b1_controller seems to be found when launching. Could you assist me in this please?
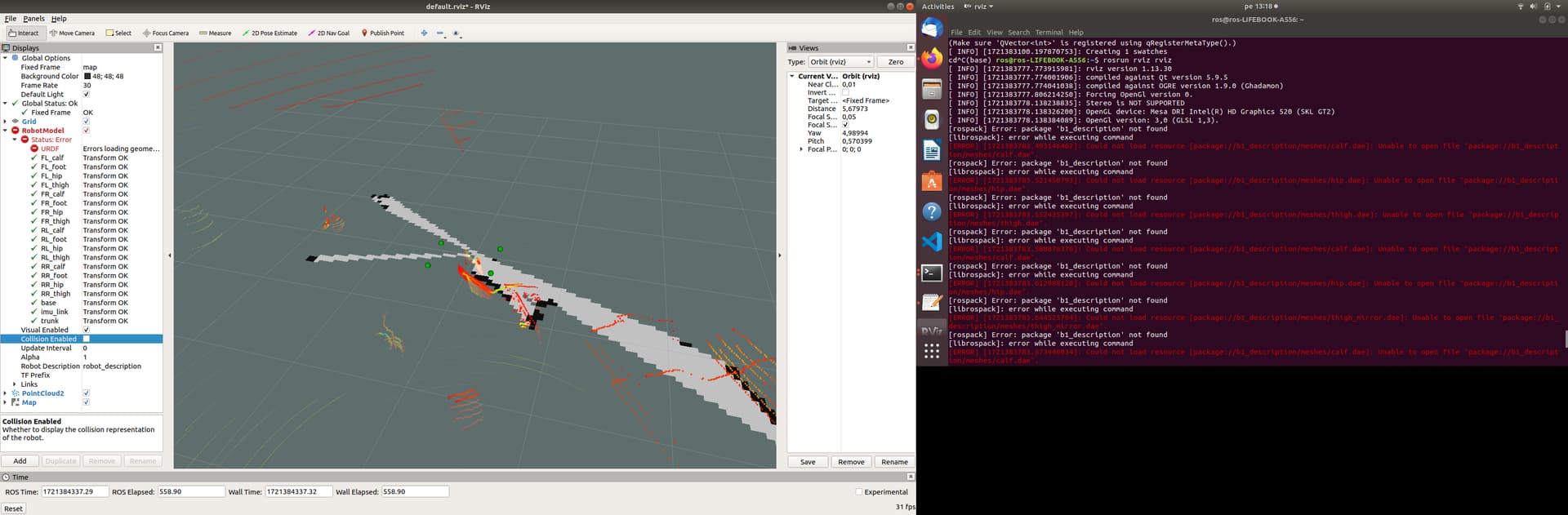
Although the joint state publisher is properly installed and running I am getting this error when i try to launch b1_viz b1_rviz.launch. (RVIZ error was because i was opening another rviz) However, b1_bringup launch without complaining about joint state publisher but as it can be seen in the screenshots above its complaining something about joystick which i don’t understand.
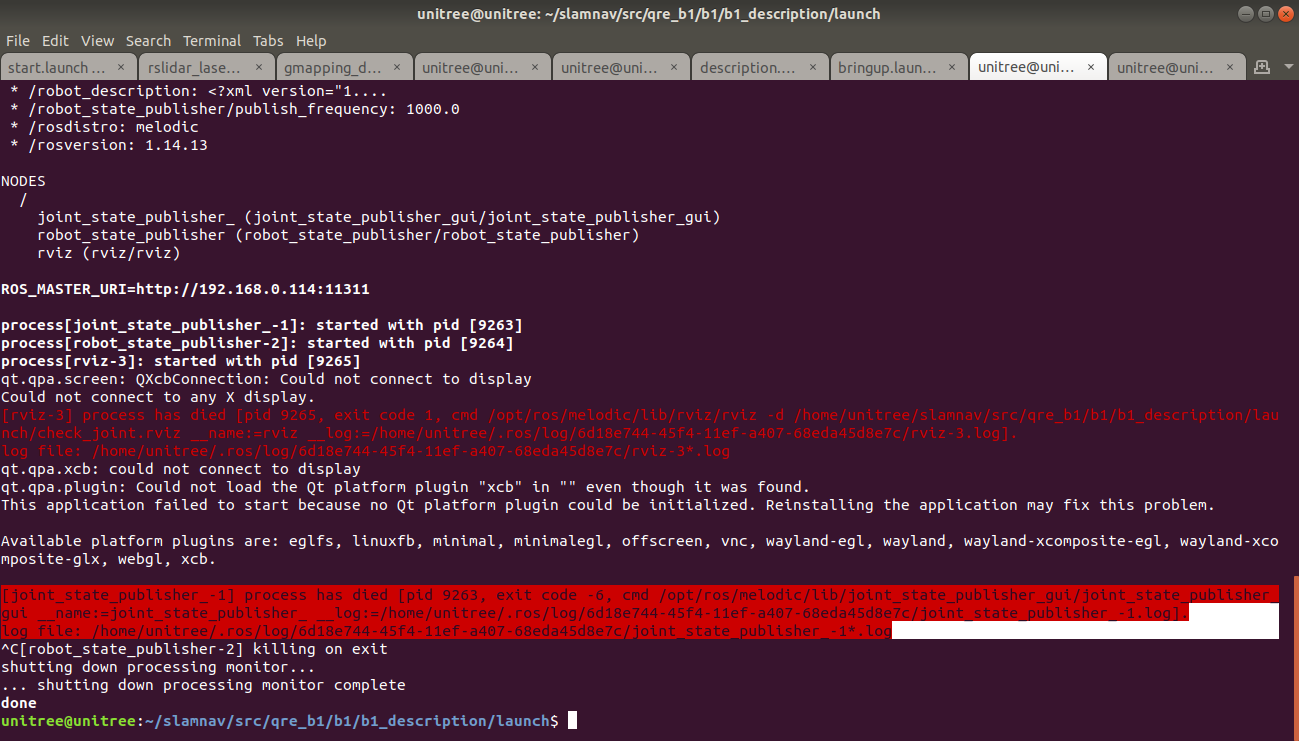
The joystick should have no effect.
The b1 package has either not been correctly built or sourced. Please remove build devel and log folder and rebuild the repo. If there are any errors in the build process please post.
This might be the reason. You may have added something to the B1 description either in incorrect format or syntax, due to which it is failing seems to be the case on first glance.
Also ensure the b1_base has correctly assigned IP. It depends on whether you are connected via WiFi or LAN.
1 Like