Hi guys,
I’m trying to convert the video stream so I can implement the video output in a gui I’ve made.
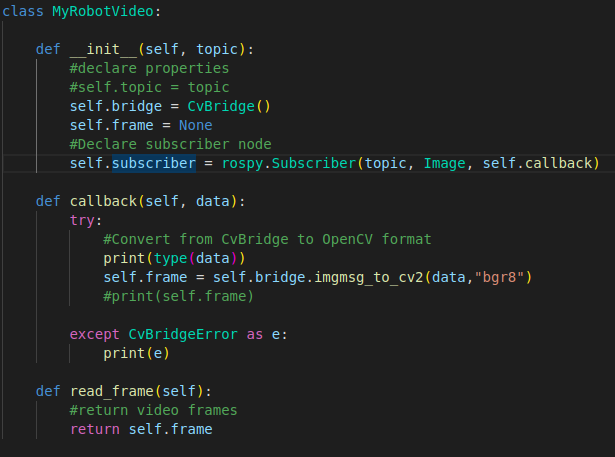
self.frame = self.bridge.imgmsg_to_cv2(data,“bgr8”)
It probably has to do something with this line, but I can’t figure out what goes wrong here.
When I print “data” it does output the videostream, but self.frame stays empty. “data” is of type “sensor_msgs.msg._Image.Image”