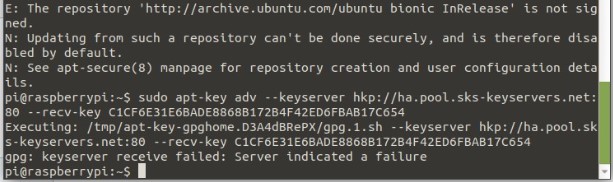
When i run the key sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 i get an error ‘keyserver receive failed’
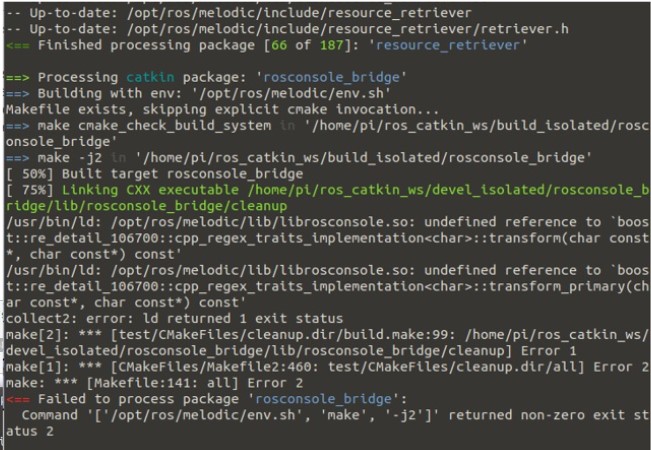
When I continue with the installation I get errors installing the catkin workspace.
I would advise installing ROS on the Nvidia board of the A1 to allow for more computational power, or better yet, I would recommend remotely controlling the robot by installing the A1 package provided by us on your Host PC and then controlling it through either LAN cable or WiFi.
It is not a good idea to disrupt the pi’s environment without first making a complete backup of it and it can cause failure in its functionalities.
Also, several ros-packages are not available for the pi which seems to be the cause of the failure.
Dear @Sohail ,
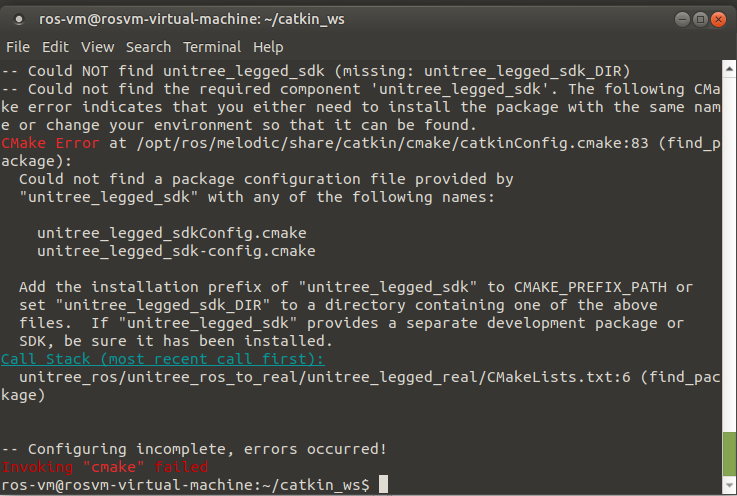
Currently I have all the ROS packages available on https://github.com/unitreerobotics installed on my pc , however I am facing trouble installing unitree_legged_sdk . I am not sure if it has to anything with the version I am trying to install or the folder structure that I am following.