I am a student doing a thesis with an A1 Unitree and I am also relatively new to this technology. I started by reading the manual and your posts.
My goal is to use the SLAM function and make the robot completely autonomous in which he can solve a maze by himself using Slam, Lidar and A* search algorithm (a bit ambitious ).
I started by reading the manual, check your posts etc. My Unitree has a jetson tx2 series and a SlamTec RPlidar M2M2. I am excited, but I already encountered some problems. I will explain those in more detail below.
1-I can’t connect via ssh from my own computer to the robot. It asks for a password that I don’t have.
2-The app isn’t working properly. I only can connect the remote to it but not the robot, so i don’t have vision, slam etc. I enter the 5g Hotspot that the robot produces but nothing happens
3-I wanted to reorganize the folders of the A1 Main computer but I am afraid of doing something and destroy everything. Is there a way to copy the system into an image or do a factory reset in case I do something wrong?
4-I can’t connect the unitree to the Internet using an Ethernet cable, so I can’t install tools on it.
5-I can’t run low level and high level commands from the unitree legged sdk. I believe this is not possible since I don’t have the lcm dependency, but since I can’t install it because I don’t have Internet, I don’t know what to do.
Great to hear about your project. We would recommend to have a look at the A1 docs. Manuals and A1 specific information is available there.
It usually is 123 for the jetson other pswds are mentioned in the docs for the pi.
Connect via LAN and check if the webserver of the A1 is working correctly.
We would recommend not touch the A1’s atom board/ pi board at all. The jetson you can definitely reorganize but it too will result in breaking of their automated scripts. Backups available are A1 version specific so wont help in your case if you have a backup from online. You may have to copy the current A1 jetson image.
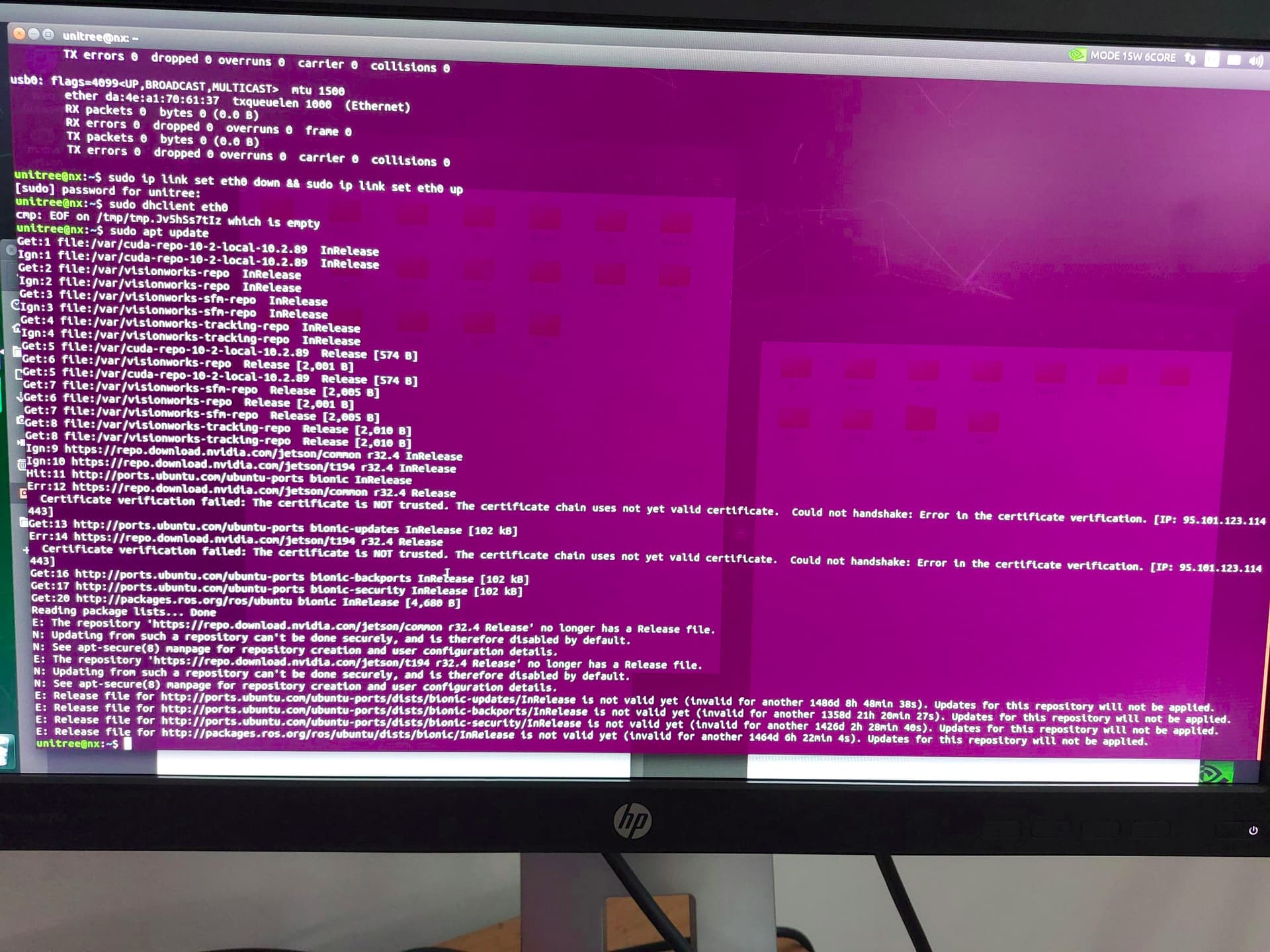
Connect your A1 with LAN that has internet and run the following commands:
sudo ip link set eth0 down && sudo ip link set eth0 up
sudo dhclient eth0
sudo apt update
Hey.
So regards to step 1- I did the ssh to 192.168.123.12 and 192.168.123.161 and both worked with the password being 123. However, how can I know which Ip is for what? Using your documentation the 123.12 is the Raspberry Pi and the 123.161 is the Nvidia on board. However I dont think we have a Raspberry Pi but an Tx2 Jetson. How can I be sure of it? Also, when I run ifconfig on the robot there is another IP 192.168.11.110 which I believe is also related to the Tx2(but this one I can’t do ssh).
Step 2- I connected the robot via the hotspot with my phone. But I don’t get any vision . How can I see if the webserver us working correctly?
Step 3- Okay So is there a way to make a copy of the current image? I tried to use clonezilla but Tx2 series doesn’t allow boot via usb drive . Besides when I say organize its because the unitree legged sdk is outside the catkin ws but in everything I see its inside it so I am a bit confused
I just came across and can just answer Step 1 - the other steps can be explained by my collegues
The Unitree robots usually have two PC’s one on which you could get access (NVIDIA TX2) and a second on which the gait controller / low level controller is running (Raspberry Pi) You can just run custom codes on your NVIDIA Board - The Raspberry Pi is usually blocked for third party applications.
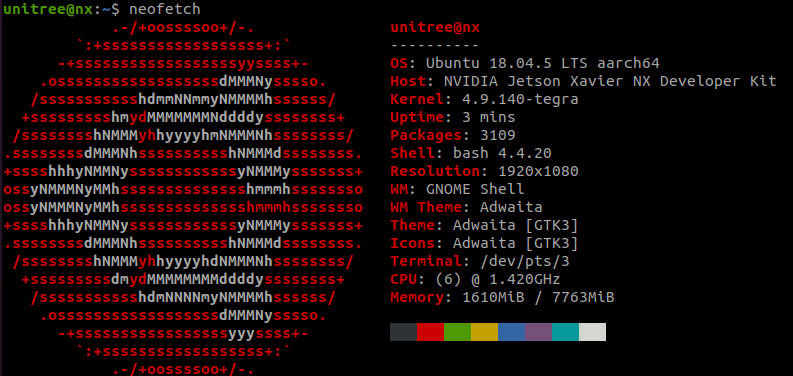
Different versions of A1 have it switched. You can install and use the command neofetch to find out the system.
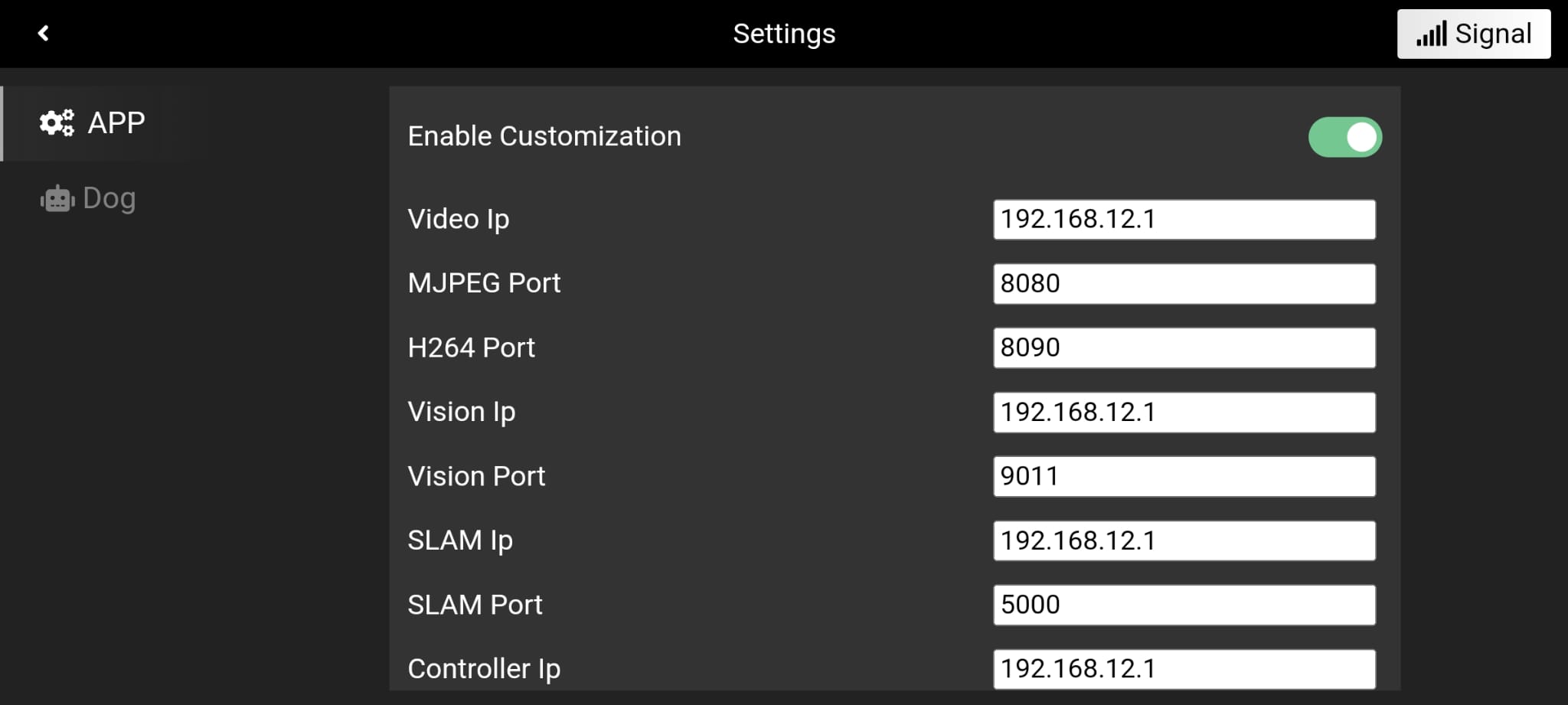
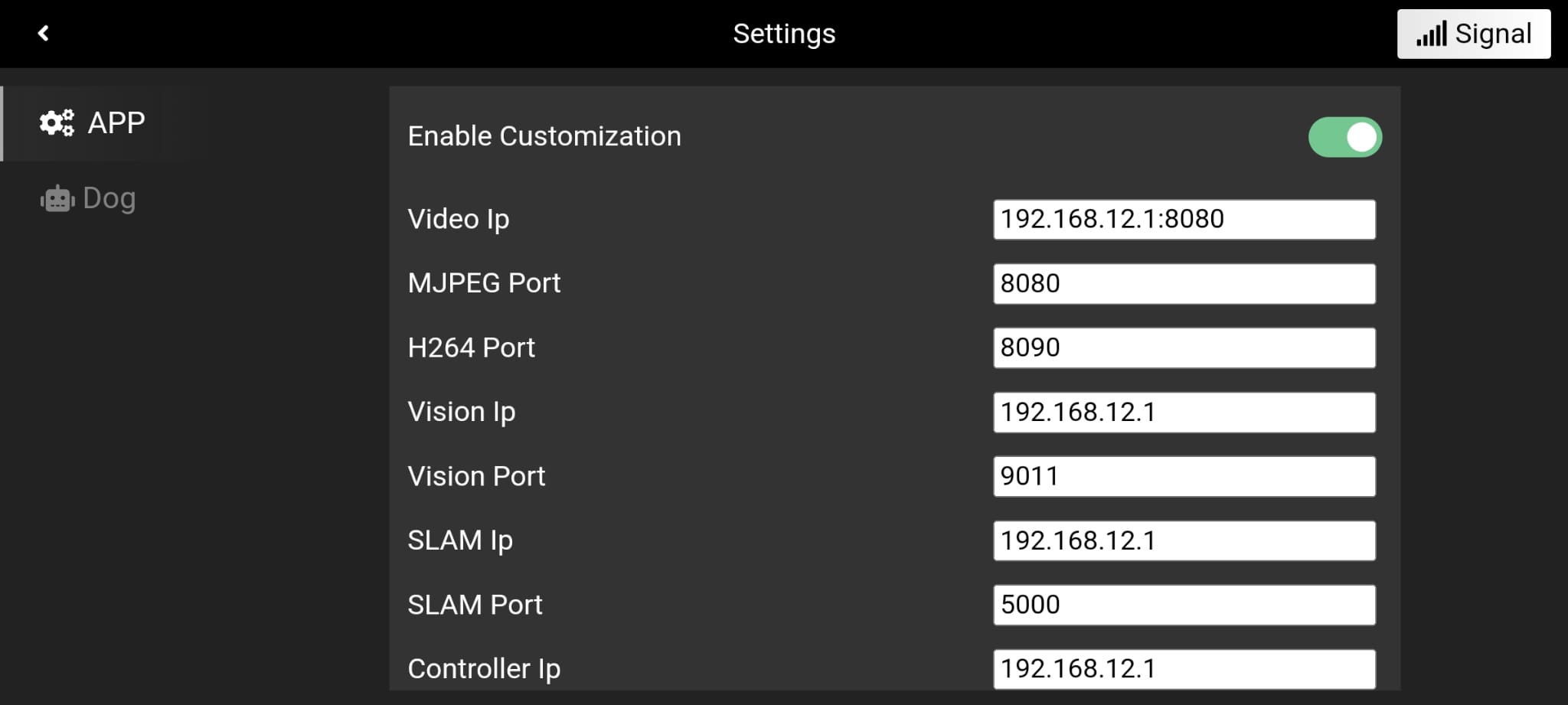
If the IP of the Wifi of the A1 is 192.168.12.1, then using the app see the port number of the A1 and put it into the webadress e.g. something like 192.168.12.1:18333
For this you can check on the nvidia forums on how to make a copy. You can also use ubuntu’s default image cloner.
You have to change region and the data base from where it is pulling the debian packages from. Also ensure the time and date are correct on the A1. Also do not do sudo apt-get upgrade it will disrupt the system.
Yes if you have purchased the A1 from us you can send an email to support@mybotshop.de with your Github username and purchase id and you can just use that to auto install the dependencies and gain access to the system via ROS.
OK so I can’t access the second computer correct? If so, what is the purpose of the usb,ethernet and hdmi entrances if I can’t access that computer? Just to power up the Lidar for example?
Step 3- Sadly I only find clonezilla videos or topics and I don’t think I can copy with it.
Step 4- I think the ethernet is working because i got internet on my phone using the wifi hotspot of the robot and I also can install things like hardinfo and neofetch.
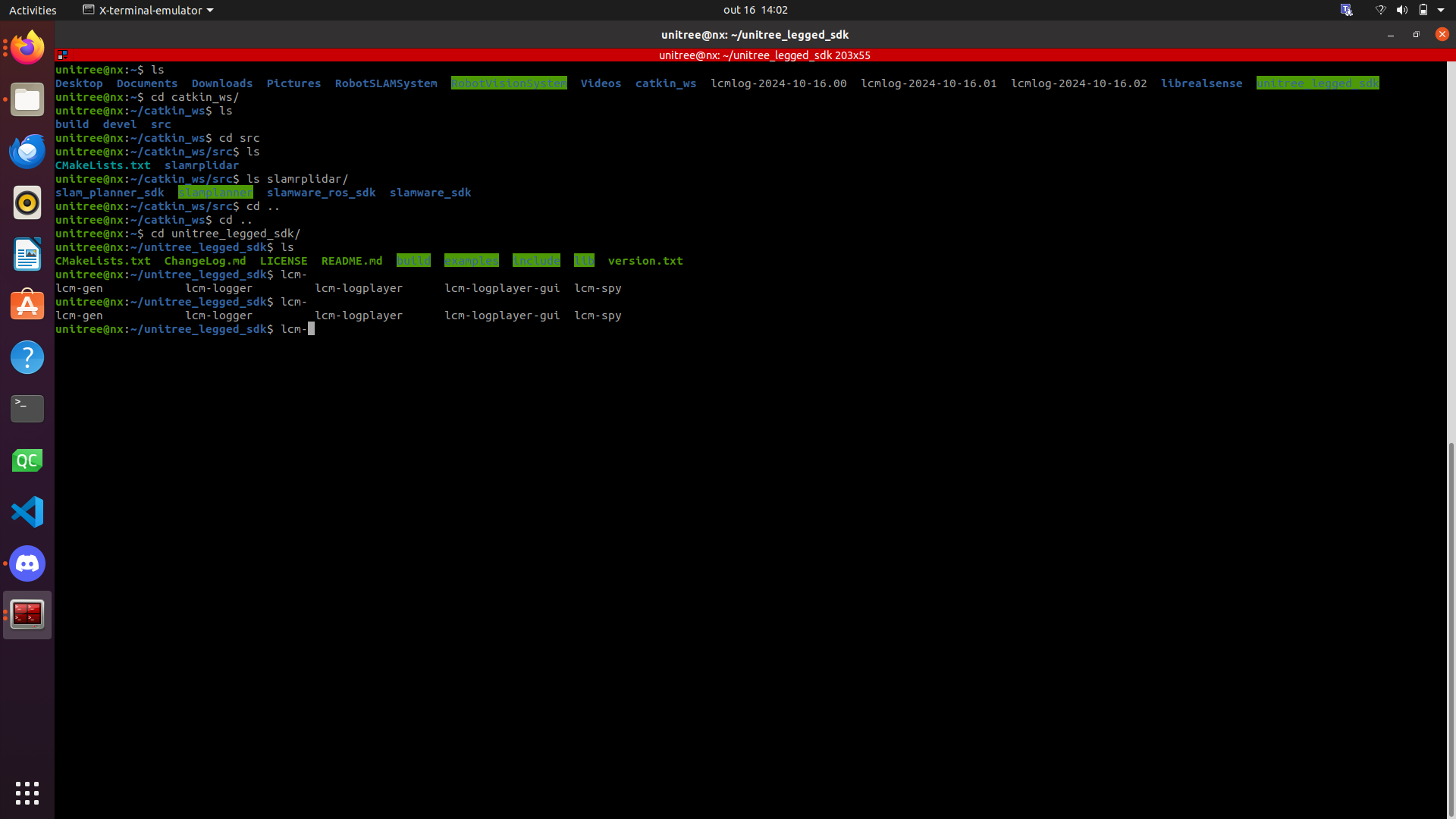
Step 5-Sadly I don’t know if the university bought from you or not. I think the RosMaster isn’t starting when the robot is connected but I need Ros to communicate between my computer and the robot so I can make it autonomous. Also on the GitHub - unitreerobotics/unitree_legged_sdk at v3.3.1 they tell us that we need the lcm 14.0 and they create a folder and build it etc. However i dont know if the folder should be inside the unitree legged sdk or can be outside of it. On the A1 I don’t find the lcm folder but I have the lcm commands so I am a bit confused. Below I have an image with the folders lcm commands etc.
192.168.12.1:8080
Try this in the web address and see if the image is coming when you are connected to the A1.
By default there is no ROS master running in the unitree A1 from the factory for the default unit at least.
I would recommend using their 2.8.1 version. For installation of unitree SDK it would be best to follow their documentation, if you are looking for existing ros wrappers, you can query info@mybotshop.de if the robot was purchased in which case we would provide you with pre-built ros wrappers for the A1.
Step 3- Ok but its possible to create Ros communication between the robot and an external computer correct?
Step 5- Yhea like I told you I don’t know if the robot was bought from you guys, sadly. In the unitree ros gitthub, there isn’t a version 2.8.1 and they tell that the sdk for the A1 is the 3.3.1 or 3.3.4
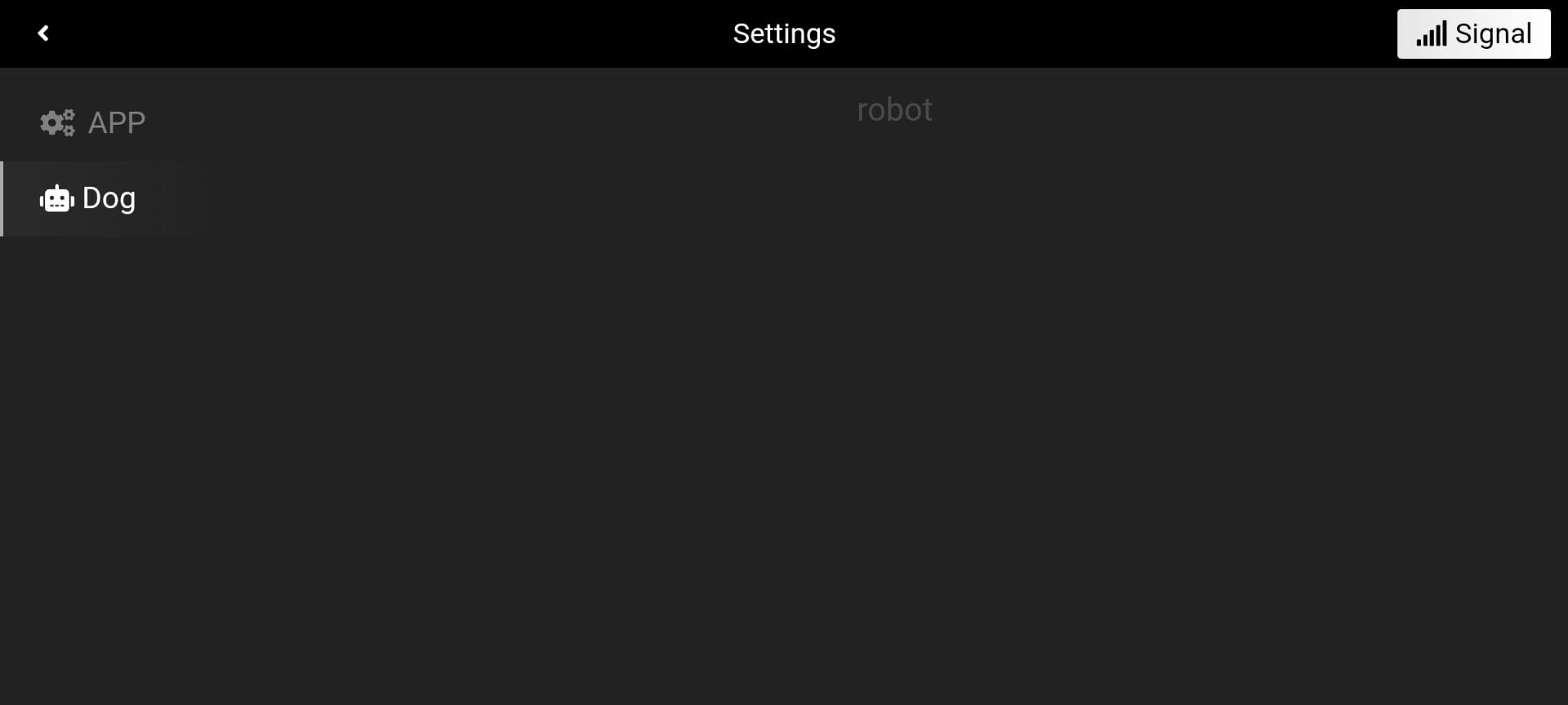
Step 2- Is it possible to start the camera manually? Or any way to know if the hardware is broken? I know that the camera is working, because its emitting infrared light. Besides the robot isn’t even connecting to the App. I connect to its hotspot which is working perfectly fine,but after that, I can’t connect to A1. I click on the signal button and then Robot and nothing appears.
Step 3-Ok thats nice to know. Any tip where to begin?
Step 5-Ok 3.2 instead of 3.3.1. I will change the actual version of the A1 and see if it works. I tried to run sudo ./lcm_server A1 HIGHLEVEL from the unitree_legged_sdk/build and it gave me this error:Pthread set sched policy failed. Without the sudo, it gives me Segmentation fault error. Any idea why this is happening?