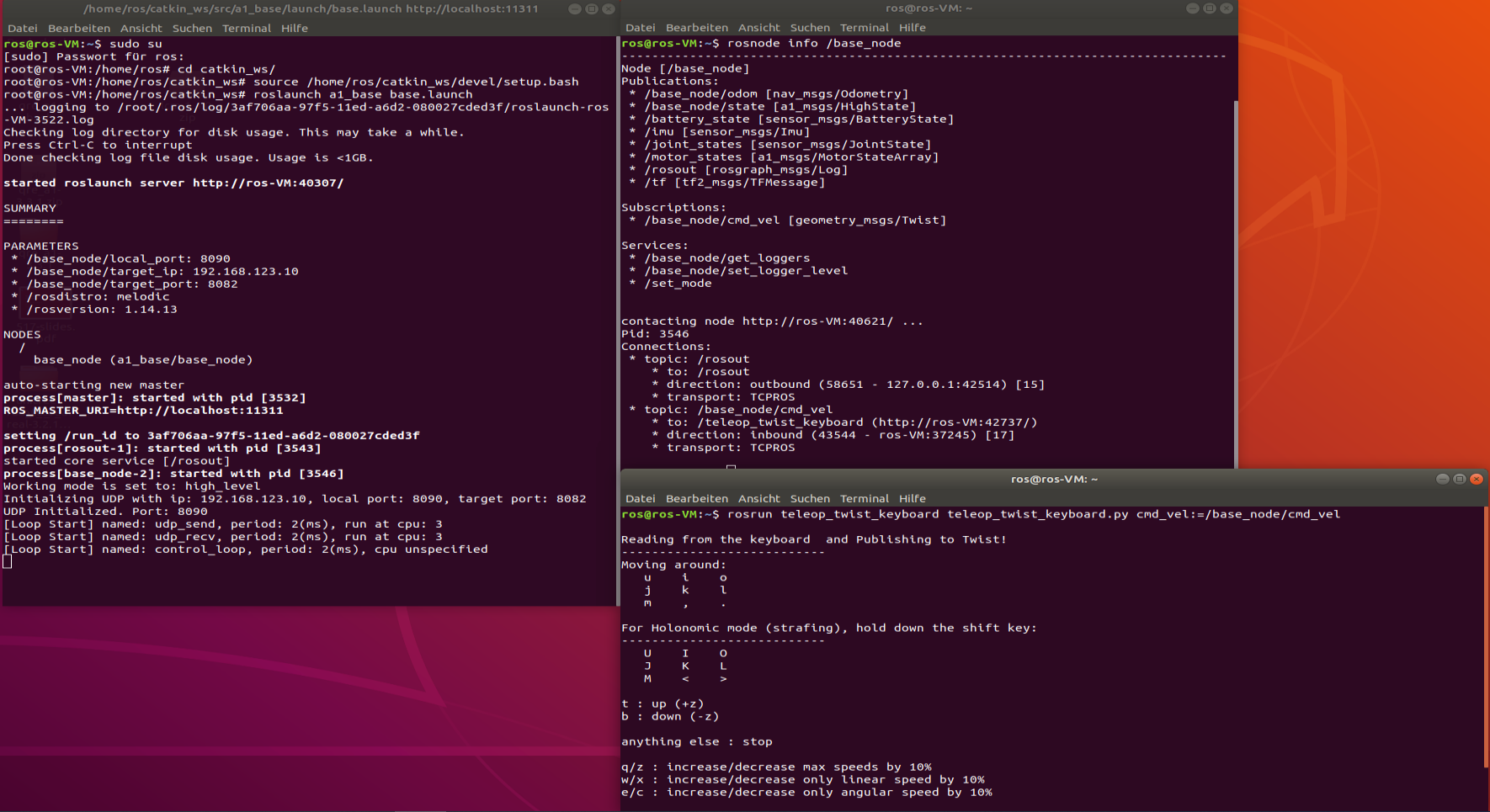
@jgrube on the top right there is the rosnode info. It points to the /base_node, which is running on the same system.
@Sohail now the command displays the walking methods, but the robot is not moving. Neither in normal or sport mode it is not walking with the teleop keys. Can you also help me out here, please?
As stated in the docs of the A1 driver, the driver can be installed on a remote system, correct?
So the rosmaster ist running on my remote system and should establish a connection to the 192.168.123.10 board. Wouldn’t it be better to run the rosmaster on the nvidia and connect from the remote system to it with the ROS_MASTER_URI?
Please press start in the remote to put the A1 in movement mode.
As mentioned before, you do not need ros multi-machine. You can revert the ros network changes to the local host settings. The ROS uses LCM to communicate with the A1.
As stated in the docs of the A1 driver, the driver can be installed on a remote system, correct?
So the rosmaster ist running on my remote system and should establish a connection to the 192.168.123.10 board. Wouldn’t it be better to run the rosmaster on the nvidia and connect from the remote system to it with the ROS_MASTER_URI ?
Some of the A1 models have their own native ROS systems, we suggest to use on a remote system to avoid disrupting their system, but you can always do it if you want. Removing their ROS system should disrupt any functionality of the A1.
although pressing Start on the remote controller and being in sport mode as Tahir mentioned, the robot does not react to the keyboard commands from teleop.
I reverted all network changes and I did not change anything on the nx nor do I plan on removing the native ROS system. It was an idea to have the node/master running on the nx system and the teleop command from the remote system.
Do you have any guesses why the robot would not react to the commands from the remote system?
If it helps, we also have an early version of the A1. Same as here.
I also tried working with the qre_a1 driver version 3.2.0, but with this version I could not invoke the roslaunch qre_a1 base.launch nor could i launch any other package with this version.
Could you please tell me more about the compatibility with the unitree sdk 3.2 and ros_to_real 3.2.1?