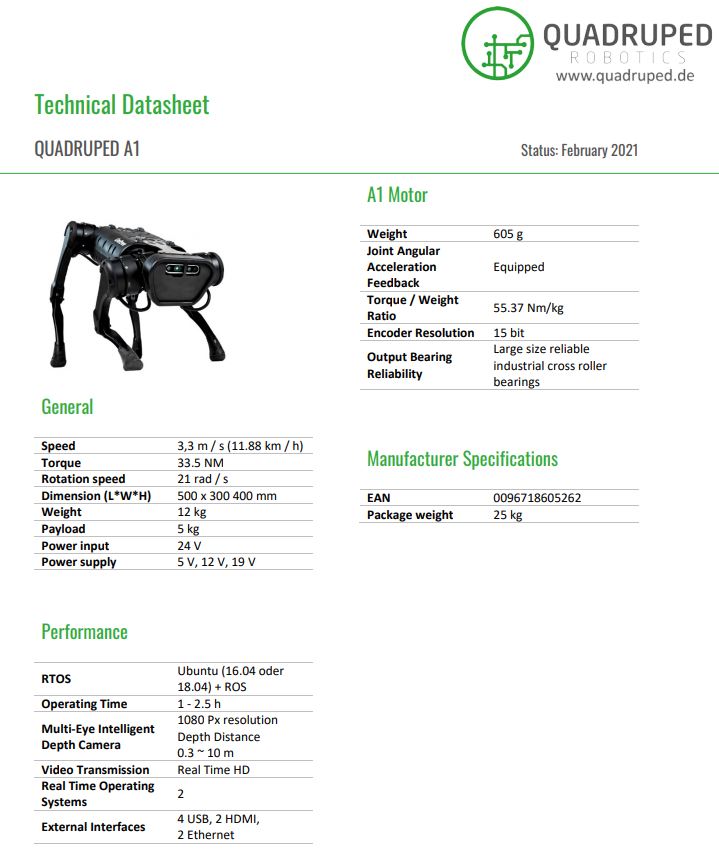
Our goals is to send commands (either with ROS or unitree_legged_sdk) to the robot Unitree A1 via SSH from a VM.
We have experienced some difficulties and would appreciate your help on this matter. Could you give us a detailed instruction on how to successfully control the robot via PC? And which board do we connect to?
I tried everything on docs.quadruped.de and also had a look on forums but couldn’t solve the issue. I’m also not sure if we ever received the a1_installation script (in case this is necessary).
Additionally, what would be the best way to access the video stream and use it via python?
Here is what we have done so far:
Retrieved IP address from Raspberry Pi and Nvidia board
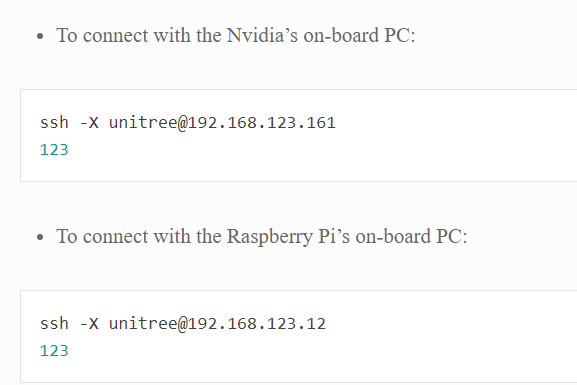
a. Pi (rear end of the robot): 192.168.123.161
b. Nvidia: (front): 192.168.123.209
Connected to WIFI
SSH’d into Pi
a Can’t control robot, cmake doesn’t build the unitree_legged_sdk correctly. There is also no catkin_ws folder nor ROS installed
SSH’d into Nvidia board
a. This one has catkin_ws and ROS is installed on it.
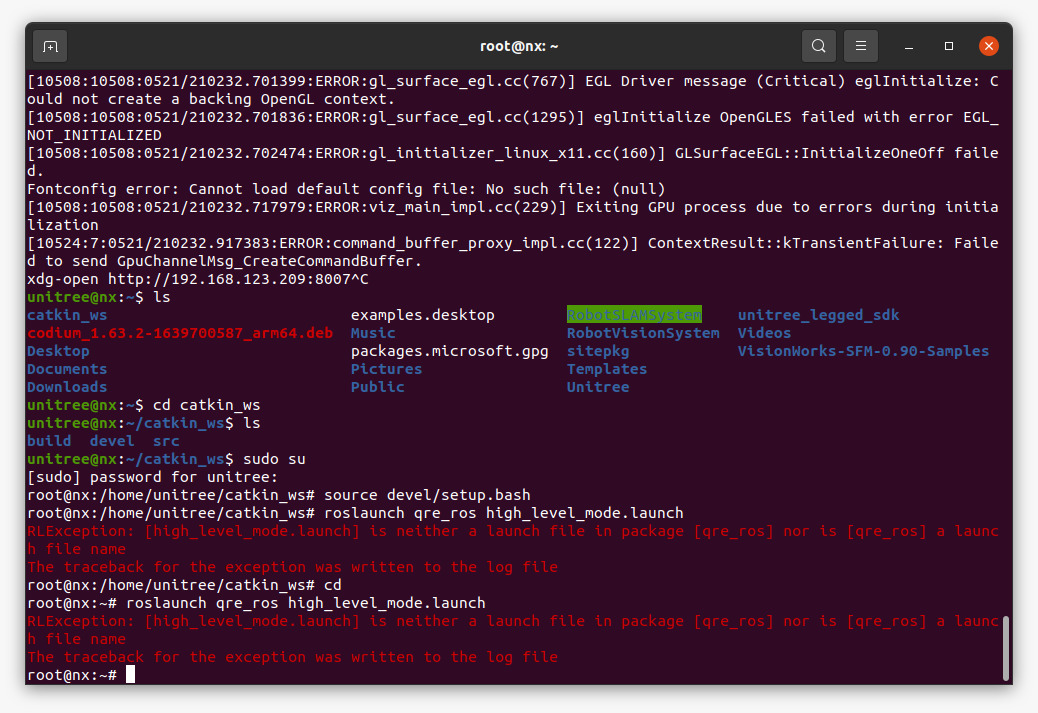
b.However high_level_mode.launch is not recognized. It says it’s not a launch file in qre_ros. I’m stuck here.
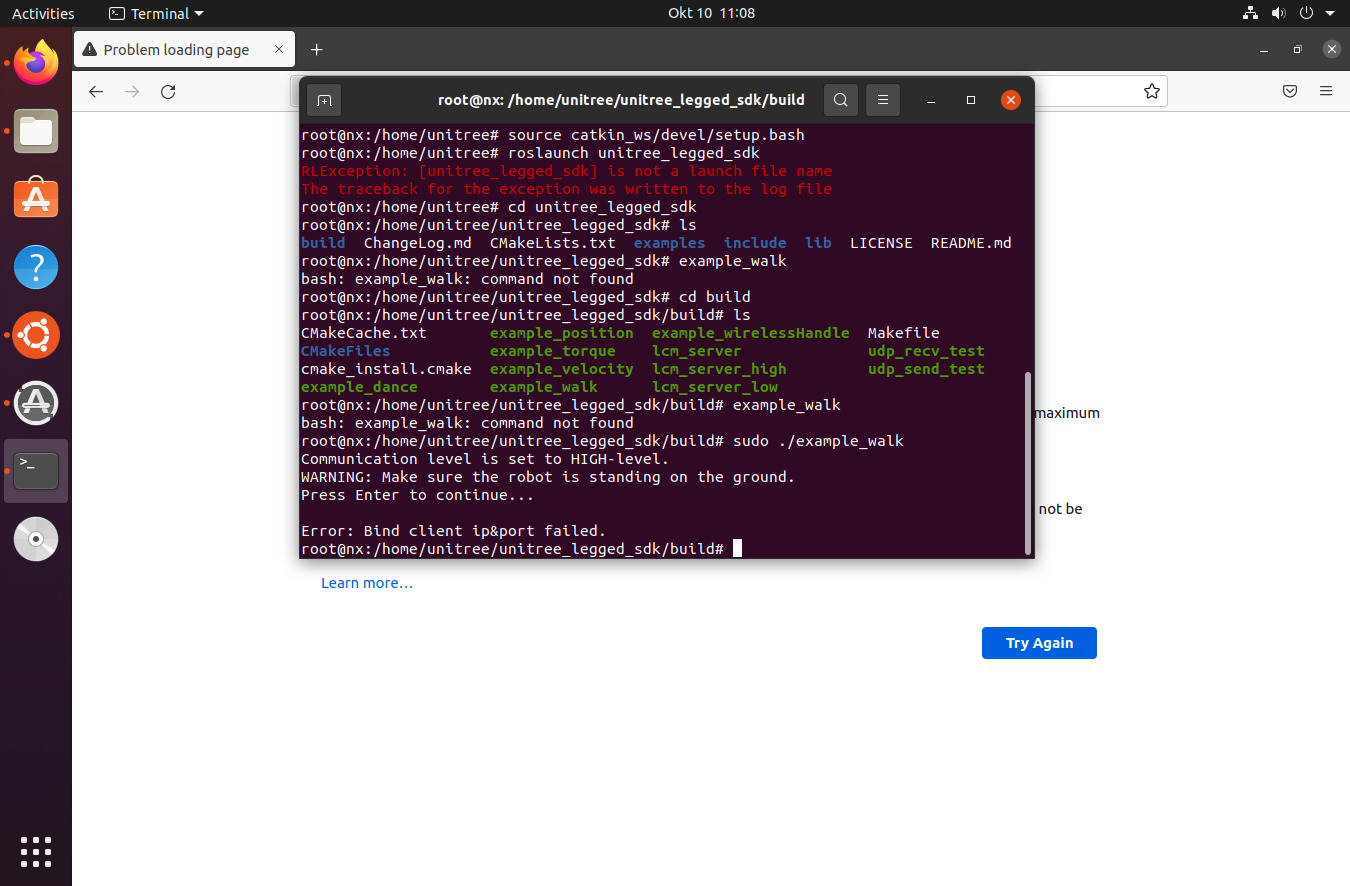
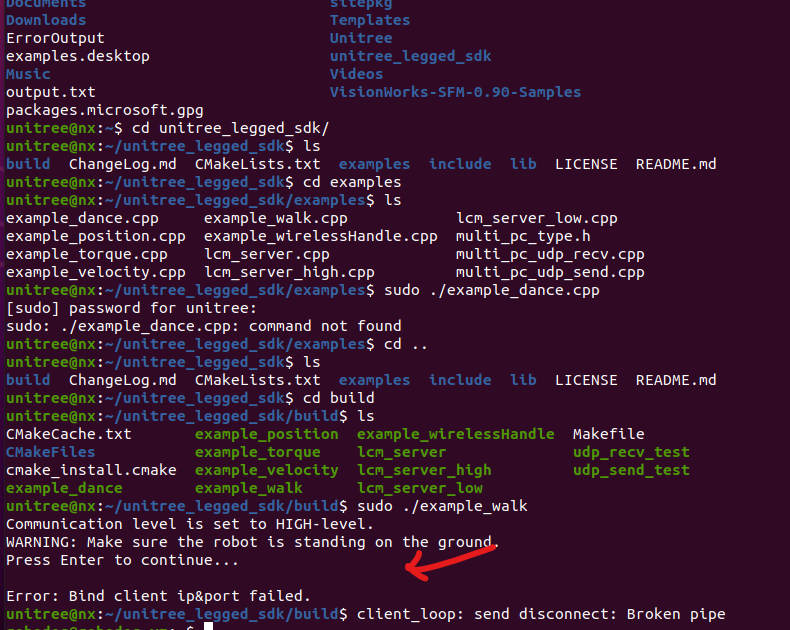
c.I tried executing the example files in unitree_legged_sdk but the following error occurs: Error: Bind client ip&port failed
One quick question can you access the A1 via its hotpsot? It has the WiFi SSID if UnitreeRoboticsA1-*** and the password is eight times 0 or 00000000.
If so you can connect via WiFi and the Vision IP is 192.168.12.1:8080, you can view other ports via the app. For the control I need to know the A1 you have, and the sensors it has, because we have different firmware for different A1’s.
Get the latest A1 software package. The old catkin_ws can be deleted in the Nvidia PC of the A1, then you can copy over the new A1 software package over to Nvidia via
After that, you would need to activate the internet, the instructions are in the README.md. Next step is to run the script, you may have to give it super user via
sudo chmod +x a1_installation_script_3.2.0.bash
To run
./a1_installation_script_3.2.0.bash
Just follow the instructions! Hopefully, it should install everything smoothly. Wishing you a good day.
please sudo nano /etc/network/interfaces
an un-comment all the items after you have completed the installation of the A1. The IP should return to 192.168.123.12 after you restart the robot or the network manager
I was able to corrrectly install the software package (with internet). How should I proceed now regarding controlling the robot?
I tried:
sudo su
source ~/catkin_ws/devel/setup.bash
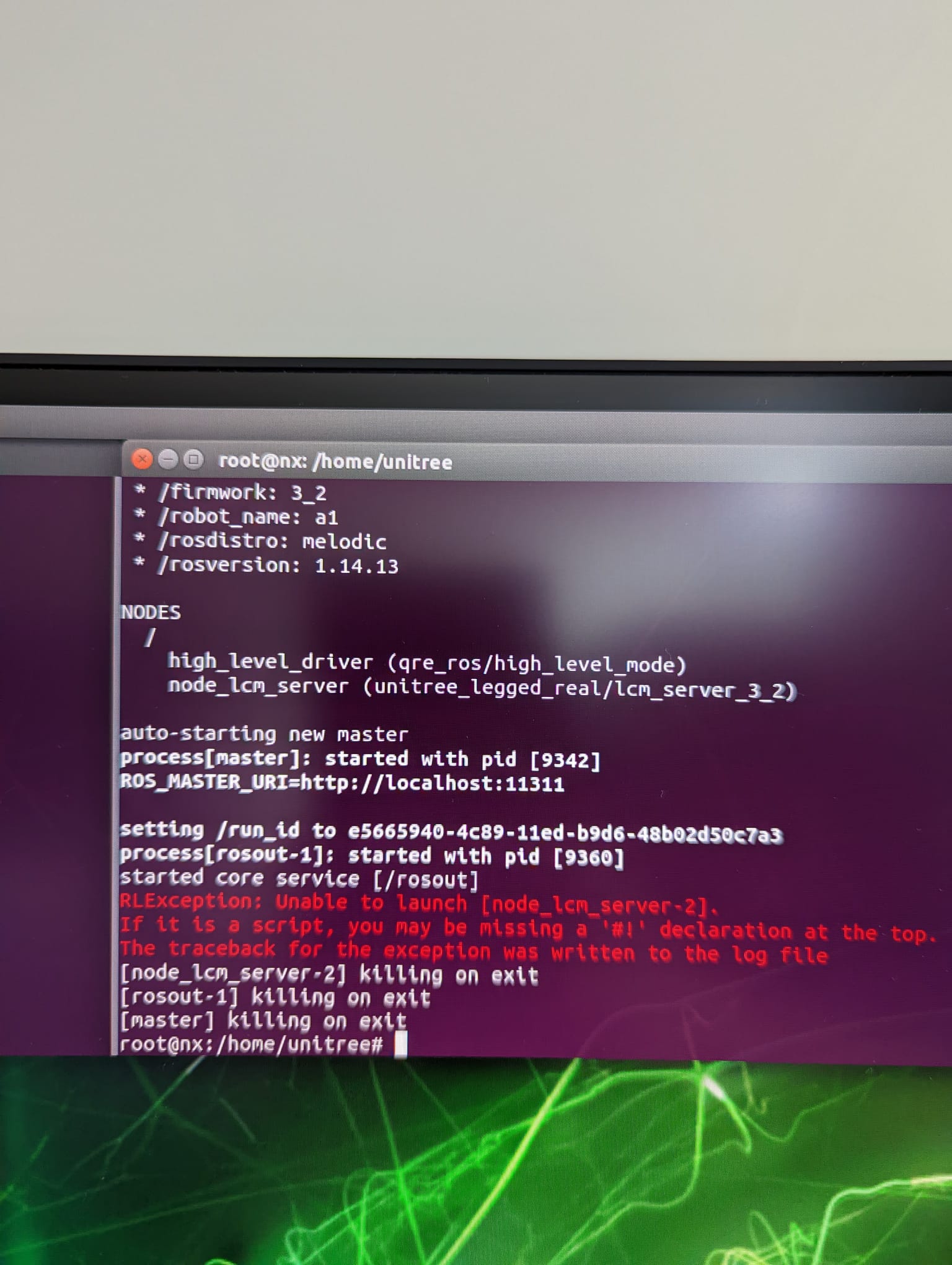
roslaunch qre_ros high_level_mode.launch
However, it said that lcm_server is unable to launch.
Have you reverted the internet access by un-commenting the interfaces? Also, were there any errors during the installation of the packages in the Nvidia nx?
Yes, I uncommented the interface and now the IP changed back to 192.168.123.12 as intended. There was an error in the beginning when I didn’t have internet connection, but I deleted the catkin_ws folder and ran it again with internet access. It completed without errors.
When you re-ran with the internet connection, I’m expecting that you ran the install script and not catkin_make/ catkin build. If it has been successfully built, it means that the error is from it unable being to connect to the A1. If you have reset and un-commented.
Perhaps try restarting the A1 and running again:
sudo su
source ~/catkin_ws/devel/setup.bash
roslaunch qre_ros high_level_mode.launch
Also please share the ifconfig of the nvidia nx as well as the content in the final lines lf /home/unitree/.bashrc
Are you able to ping the other PC in the A1. This issue seems quite strange. Is anything else connected to the A1 via the Ethernet ports, if so please try removing it and reconnecting.
Also please do the following, if it still doesnt work.
cd
source.bashrc
cd catkin_ws
sudo rm -r /devel /build
catkin_make
source devel/setup.bash
If it still doesn’t work, try running the Unitree SDK directly without ROS. If the installation of the LCM by the install script was successful then if you go to the catkin_ws/utils/unitree_legged_sdk-3.2.0/examples folder. In there try running
sudo ./example_walk.cpp
The robot should start walking so be careful.
If this does not work, it means the installation of the LCM failed. For that, you must delete the catkin_ws, re-run the install script and carefully watch and make sure that when the build of the LCM reaches 100%. If it does not reach 100% then it means either a package is missing or the architecture/environment variables have not been set correctly.
One more thing that you can try is to install the provided package in your own PC/Laptop with ubuntu 18.04 (be sure to change the parameters as mentioned in the quadruped docs i.e. arm64 to amd64 both in unitree CMAKE and in the qre_unitree_envs.bash) and connecting it via Ethernet cable or Hotspot to the robot and running the same commands i.e.:
sudo su
source ~/catkin_ws/devel/setup.bash
roslaunch qre_ros high_level_mode.launch
I also noticed that the IP of nvidia and pi of my robot is reversed compared to in docs.quadruped.de.
To access the nvidia board i have to use 192.168.123.12
and for pi: 192.168.123.161