
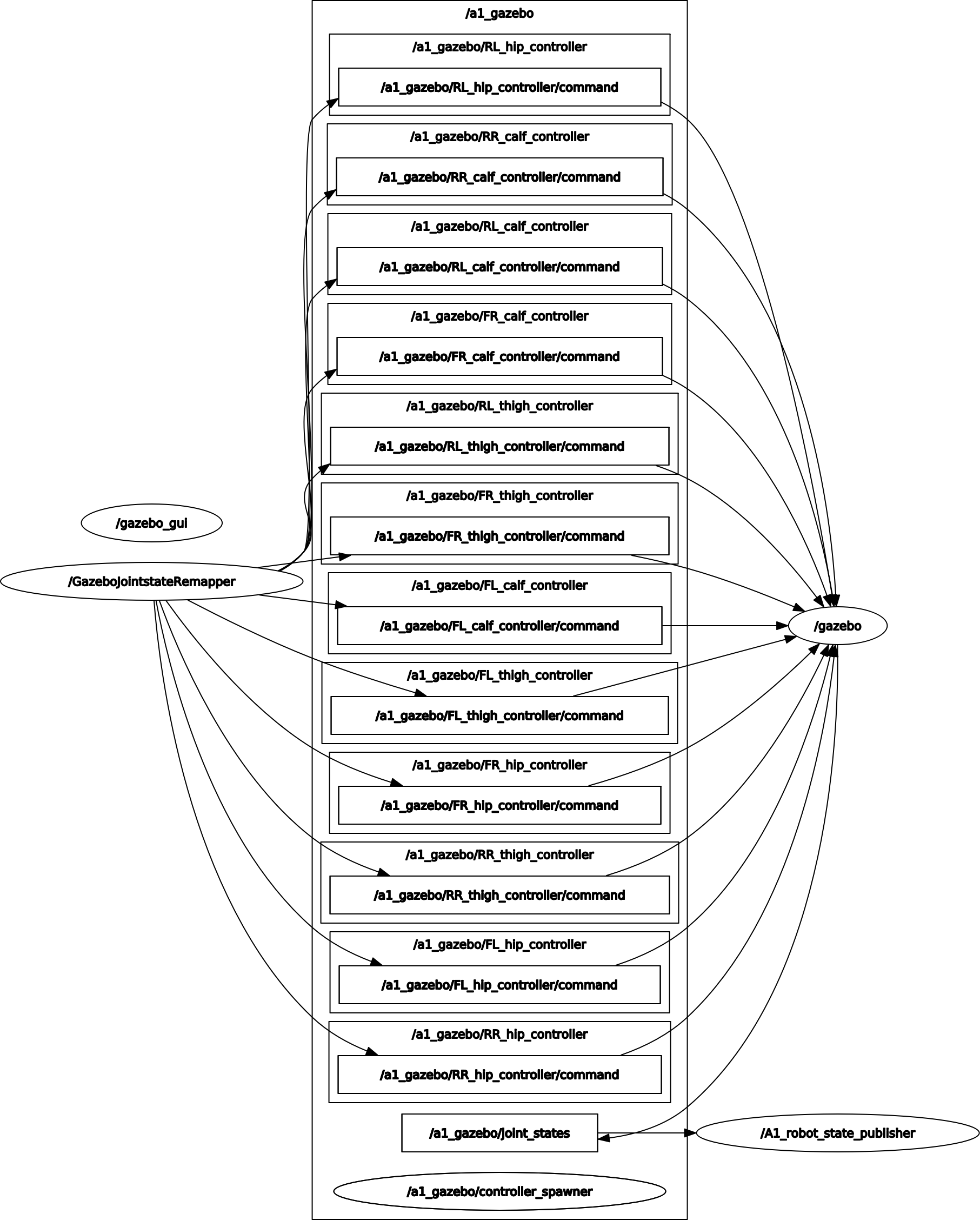
I’m currently having difficulty controlling the A1 unitree simulation in Gazebo. I have installed the qre a1 repo and all its dependencies. Gazebo launches fine and the A1 model loads, however I don’t know how to control it from here. Below is a picture of the rqt_graph:
If run the command “roslaunch qre_a1_description bringup.launch rviz:=true ll_control:=true” from the documentation I get the following error:
RLException: unused args [robot_config] for include of [/home/tom/catkin_ws/src/qre_a1-3.2.0/a1_description/launch/include/description.launch]
I was able to resolve this by adding the robot_config argument and removing the robot_state_publisher(resolved error of duplicate state_publisher (is already opened in the bringup.launch file) to the description.launch file. But after making this modification, nothing happens when I run the command.
I have also tried publishing directly to the cmd_vel geometry_msgs/Twist topic with:
rostopic pub /cmd_vel geometry_msgs/Twist -r 10000 ‘[10, 0, 0]’ ‘[0, 0, 0]’
However, this also does nothing, which makes sense because there is no cmd_vel topic active. But in the documentation it says that the gazebo launch file runs all the necessary controllers and accept commands in cmd_vel(geometry_msgs/Twist).
Unfortunately I don’t have access to a Logitech F710 Gamepad therefore and can’t test the teleop.launch file
Any help would be appreciated, I’m very new to ROS and I’m not really sure where to go from here.