Hello,
I am working with turtlebot4 on an object detection project. I want to access its oak-d camera on my workstation.
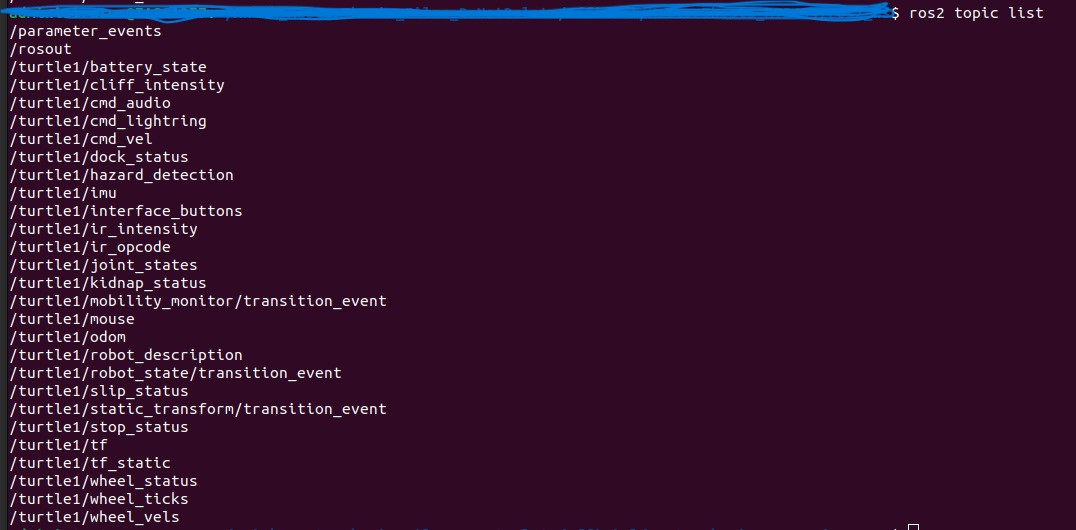
The issue I face is, when I do ros2 topic list on my workstation, the camera topics - turtle1/oakd/rgb/preview/image_raw and turtle1/oakd/rgb/preview/camera_info does not show up. That is the oakd node is not active on my workstation.
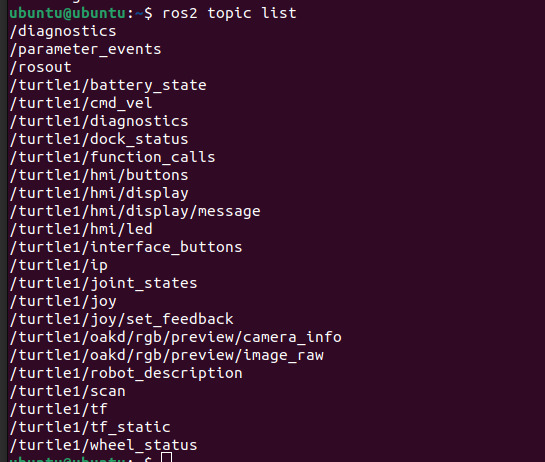
But, when I ssh into the rapsberrypi of the turtlebot4 and do ros2 topic list, the above two camera topic shows up and oakd node is active.
I have attached screenshots of both the terminal windows. (workstation and rapsberrypi)
Some information about my setup:
My workstation runs Ubuntu 22.04 and ROS2 Humble version.
Network setup between my robot and workstation is WiFi with 5GHz.
Simple Discovery connection with CycloneDDS
RMW_IMPLEMENTATION = rmw_fastrtps_cpp
Your help to understand and debug my issue is much appreciated.
Thank You!