Hello everybody,
I have an issue regarding the Marvelmind positioning system.
Unfortunately I have not been able to achieve a good performance of the device, so I would like to ask for your help to guide me how to improve it, and to finally be able to carry out a good application of the device.
-
The device is used to follow the path of a bicycle. It is placed in an elevated position so that there is no shadow or blockage of the signal from the stationary beacons.
-
the following figure shows the distribution of the beacons in the laboratory.
3. the mobile beacon (with IMU) is mounted on the bicycle as shown in the following picture:
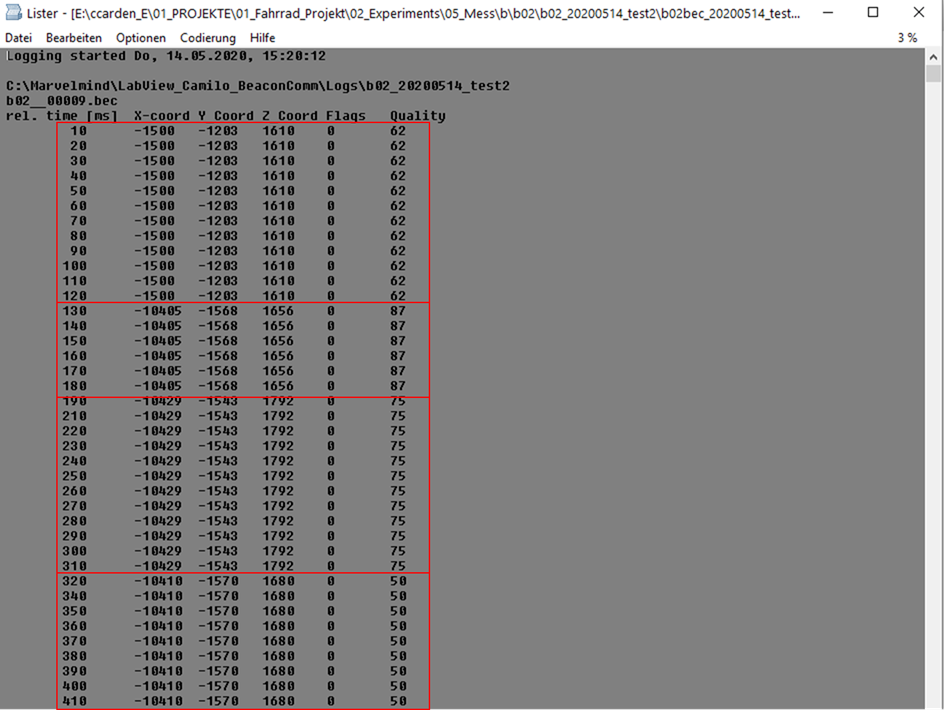
- The system is being used as it was suggested to obtain streaming information of the position of the mobile beacon by the moden. To do this, a script was written in LabView. The attached ASCII file with the measurement data was written. The following image shows the content of this file.
Here you can see that every 10 ms the system records the position of the mobile beacon. That is 100 hz. but if one sees the data, it changes the registered position after 130 ms. that is about 8 hz-
The question is, how can I improve the frequency of measurement of the position of the mobile beacon?
It is also noticeable, in the last image, that the number of measurements reported in a time interval is not always the same (even if the coordinates are repeated)
Thank you in advance for your prompt assistance.
Camilo C.
Hello,
I am from Marvelmind Robotics. First of all, thank you very much for using our system. And let us guide.
Since the question is deeply technical, I will ask my colleague to answer even deeper, but basic things first:
-
The data that is streamed out consist of two elements: IMU data (100Hz) and ultrasonic location data (8-16Hz - depending on your setting and size of the submap and chosen radio profile, etc.)
-
We always suggest first to achieve perfect tracking in the Dashboard and then obtain the data externally - LabView in your case - or another external system. It simplifies the debugging. If you don’t have perfect tracking, you can have perfect location data streaming. But if you have perfect tracking, you still can have bad location streaming because of some format misunderstanding or incorrect settings.
The steps on high-level are described here: https://marvelmind.com/download/ => https://marvelmind.com/pics/indoor_navigation_system_ENG_copter_help_manual.pdf.
Thus, please, get the perfect tracking first and only then integrate with external systems.
- Also, please, notice that we have a very powerful IMU+Ultrasonic sensor fusion. It may be, that you have it enabled. My colleague may comment more on that
We will be happy to see your enjoying our system.
Kind regards,
Maxim
Thanks for the quick answer. Could you please help me with a perfect track. What do you mean?
The informatiion about the submap is given (in the image of the Dashboard).
It can be asumed, that it is a 2d path.
Before getting the path with the aditional aplication, It was tested with dashboard.
It is possible to have a very good register of the movement of the mobile beacon (Is it what you mean?), but it is desired to have a better temporal resolution.
Regards, Camilo
By perfect track I mean track in the Dashboard. Do you have it like here, for example?
If you have it, then we can move further. Please, share.
BR,
Maxim
Hello. I’m from Marvelmind Robotics.
- Yes, the path shown in dashboard is 2D, but you can switch between XY, YZ and XZ view planes by the button in left bottom corner of the map.
- Temporal resolution (update rate) can be increased by several ways:
a) Change ‘Location update rate’ setting of modem in dashboard. Update rate can be less but never will be more than this setting.
b) Reduce size of the submap, ‘Maximum distance’ setting of submap in dashboard. By default it is 30 meters
c) Switch all beacons and modem from default 153 kbps to 500 kbps radio profile in radio settings.
BR,
Vladimir
Hi, I’m a colleague of ccarden.
our problem is that IMU-mode does not affect/improve the position update rate at all, neither in dashboard nor in labview. We already did set up the system, according to your recommendations for achiving high update rates (radio to 500kbps, <10m ‘Maximum distance’, ‘Location update rate’ of modem to 16+Hz).
That way we can get about 16Hz update rate, purely based on the ultrasonic measurements.
If we then select the hedehog and set ‘IMU mode’ to ‘high performance’ or ‘normal’ or [whatever], the update rate does not change. It stays at ~16Hz, just like without IMU. We never got anything above the 16Hz.
So we do not get IMU to work. Is there maybe some setting that is preventing IMU to become effective ? Or do we need to do anything else than setting ‘IMU mode’ to activate it ?
We also checked the logfiles (created with dashboard), the update rate in the logfile is the same as the one given in the status bar of dashboard (so it is not just a display error in the status bar).
Any ideas ?
As I mentioned above:
“Before getting the path with the aditional aplication -Labview-, It was tested with dashboard.
It is possible to have a very good register of the movement of the mobile beacon” => the track is perfect
Hello colleagues,
IMU+Ultrasonic feature is a very complex and advanced one. It works with ultrasonic location update rate of 4Hz and higher, but that depends on the types of the objects you track, movements types, their speed, etc.
How to enable: https://marvelmind.com/pics/marvelmind_navigation_system_manual.pdf => 7.15 IMU feature (FN0008).
The feature is available only in NIA.
The 100Hz is available only from the mobile beacon - not from the modem, of course - because, otherwise, it would require very high throughput from the radio link. From the modem, you get the speed equal to the ultrasonic update rate speed.
Please, clearly distinguish between:
- IMU raw data streaming
- IMU+Ultrasonic sensor fusion
These are two absolutely different things.
IMU raw data streaming is a basic stuff - it is just raw data stream from IMU with 100Hz. 6D or 9D - depending on your beacon.
IMU+Ultrasonic sensor fusion is a very complex feature, as mentioned, but it will provide also location update with 100Hz and ~12-15ms latency.
BR,
Maxim
Hi Maxim,
thanks alot for this information. I indeed missed the point that 100Hz is not available from the modem. Now its clear why we only get the ultrasonic update rate. Case closed, thank you !