
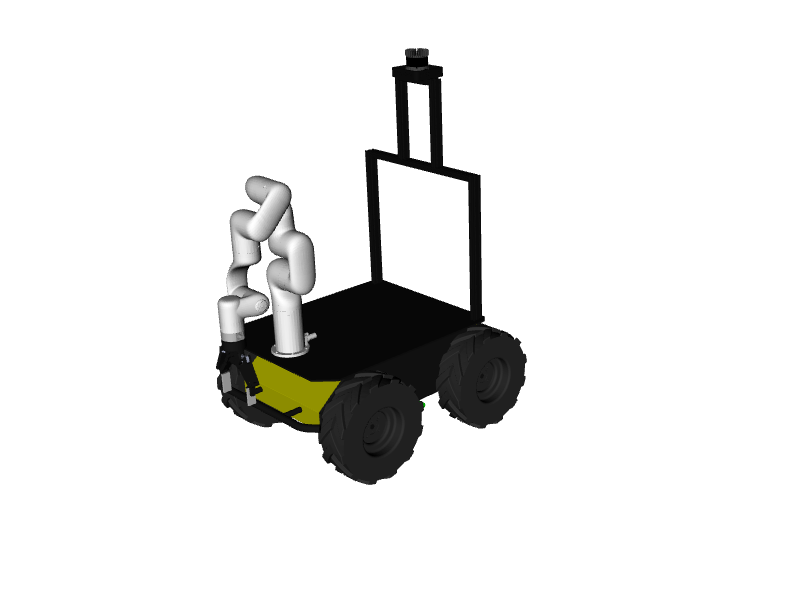
Husky | xARM6 | Robotiq 2F-140 | Ouster | Intel Realsense D405 | Phidgets

This post is a quick and compact guide for working with Husky which has been augmented with a variety of sensors such as Ouster, Intel Realsense D405, Phidgets as well a robotic manipulator xARM6 and a robotic gripper Robotiq 2F-140.
Informative Links
-
Husky ROS Cheat Sheet (Applicable to Noetic)
Quick Start
Powering On
The robot is turned on via the power button, and the start-up of the Husky may take up to a minute to start. The green light indicates that the MCU has successfully started and is now able to receive commands from the onboard PC.
For software remote connection, the robot may be accessed via an ethernet port or via the onboard WiFi.
Teleop
Some quick useful commands in case there is an issue with the joystick is to ssh into the robot and teleoperated it via:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
Network
Network configuration for the robot is.
| Device | Network | Password |
|---|---|---|
| Husky MCU | 192.168.131.1 | clearpath |
| xARM6 | 192.168.131.5 | - |
| xARM6 GUI | 192.168.131.5:18333 | - |
| Ouster | 192.168.131.20 | - |
| Router | 192.168.131.100 | mybotshop23 |
Robot Interface
The network configuration can take place in one of two methods, the first being via the static network connection and the second being through the screen, where the screen method is much quicker and easier for clients to set up. Alternatively, the hotspot Husky-A200-2.4G or Husky-A200-5G can be used to connect with the robot.
Hotspot Network Connection
To connect via hotspot, please search for the SSID of Husky-A200-2.4G or Husky-A200-5G and connect to it. The password is:
mybotshop23
Once connected, you can interface and ssh into the robot via:
ssh -X administrator@192.168.131.1
Static Network Connection
For the first time, one needs to connect through a LAN cable to configure the robot’s WLAN network.
To create a static connection in your own PC (not the Husky), in Ubuntu go to Settings → Network then click on + and create a new connection.
-
The first task is to go to IPv4 and change the connection to manual.
-
The second task is to put the Address IP as 192.168.131.1 (may differ from robot to robot) and the Netmask as 24.
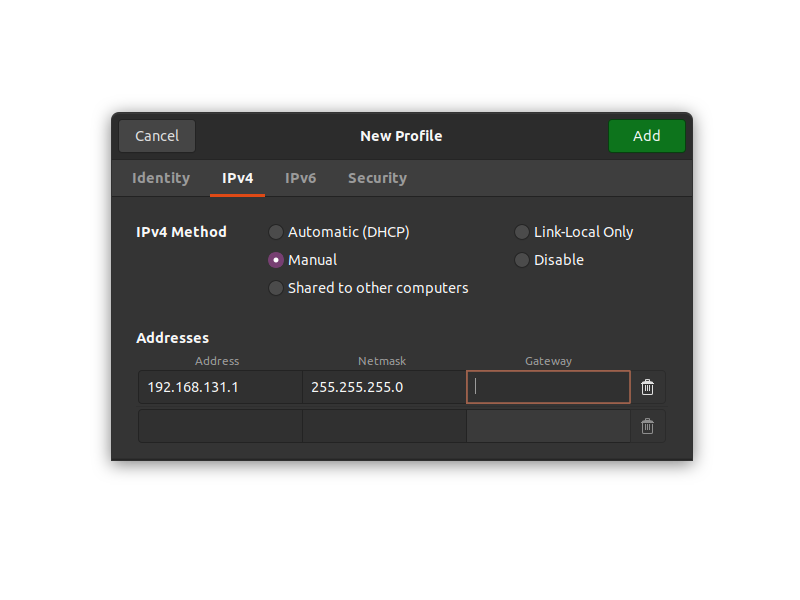
Click save and restart your network. Next is to connect the LAN cable to the robot. After a successful connection let’s check the host’s local IP by typing in the Host PC’s terminal.
ifconfig
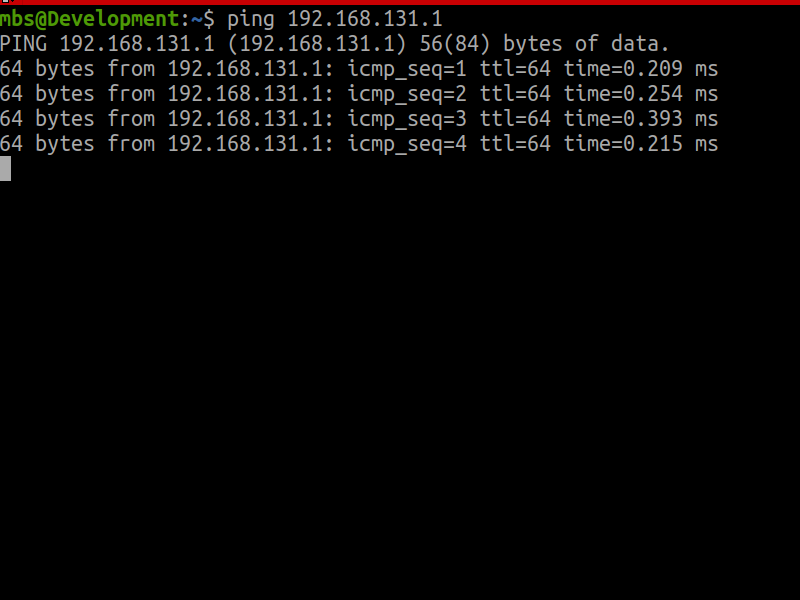
This should show the host IP which was assigned in the above step. Now its time to check if we can ping the robot or not, to do so type in your host pc
ping 192.168.131.1
After a successful ping, it’s time to access the robot. To access the robot you can type the following command:
ssh -X administrator@192.168.131.1
The password is
clearpath
Screen Connection
An alternative for connecting to the Husky is by plugging in an HDMI cable as well as a mouse and keyboard. This will allow you to connect the Husky to your own local WiFi network and then you can connect later over the WiFi.
Husky PC
The procedure is simply to go to your networks and add your WiFi. Then in the terminal type:
ifconfig
The IP that comes with the initial characters of wl is your WiFi’s IP. e.g. wlps0. With this IP you can SSH to your robot via your host PC.
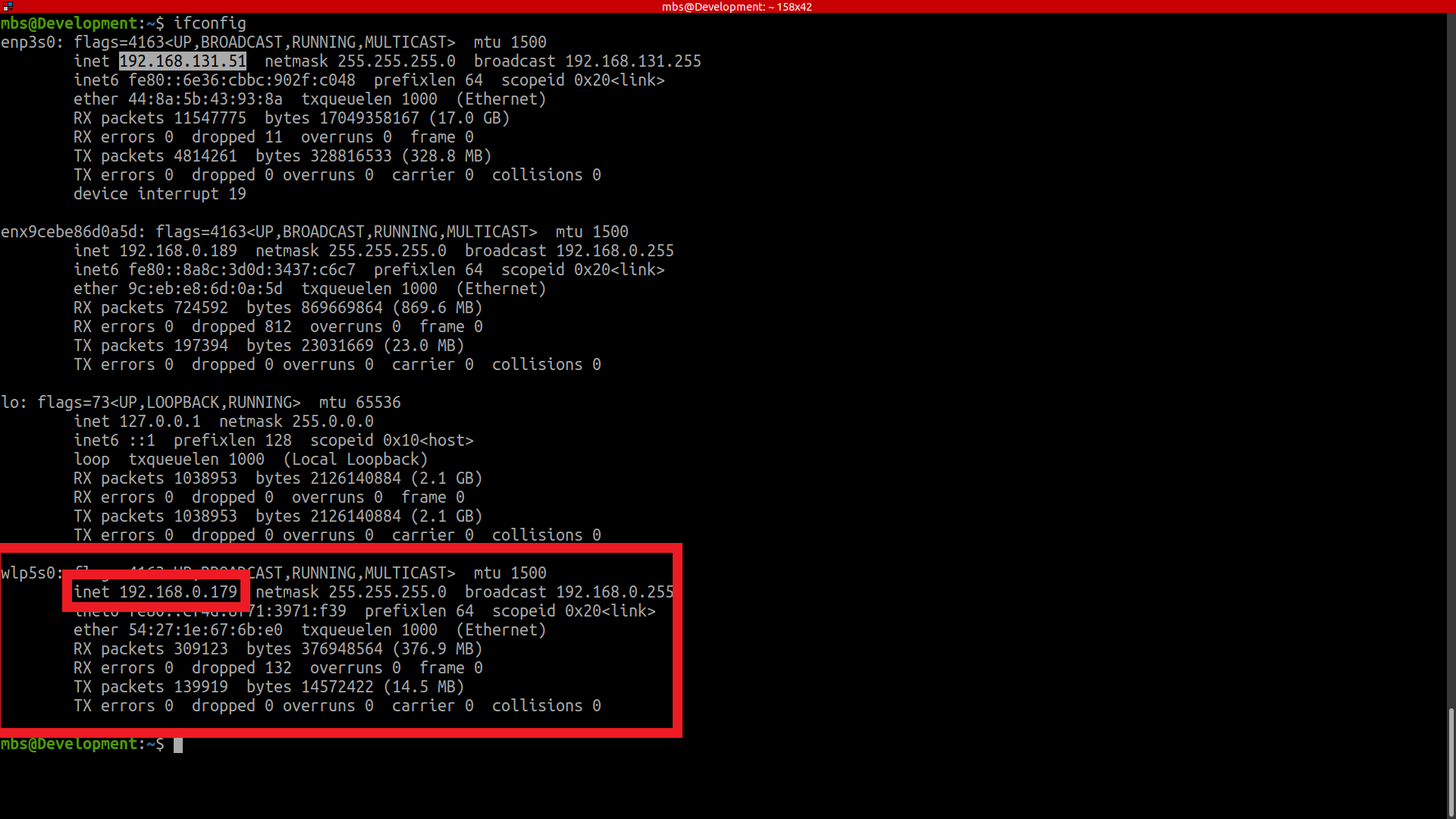
ssh -X administrator@192.168.0.228
192.168.0.228 is just an example of this. IP is taken from the ifconfig.
clearpath
Please note not all Husky are shipped with the WLAN module.
Robot Software
The Husky drivers as well as custom drivers configured by MYBOTSHOP are located in the ros_ws. In the src folder, the third_party contains the drivers for the Husky and other sensors.
As requirements vary from user to user, the setup has been left as default and the users can specify their own parameters in their own custom package. When connecting or ssh’ing to the robots pc, additional information regarding the robot will be displayed e.g.
-----------------------------------------------------
_ _ _ _ ____ __ ____ ____ _ _ __ ____
( \/ )( \/ )( _ \ / \(_ _)/ ___)/ )( \ / \( _ \
/ \/ \ ) / ) _ (( O ) )( \___ \) __ (( O )) __/
\_)(_/(__/ (____/ \__/ (__) (____/\_)(_/ \__/(__)
-----------------------------------------------------
Current PC: Husky
-----------------------------------------------------
Husky IP: 192.168.131.1
Pswd: clearpath
xARM6 IP: 192.168.131.5
Ouster IP: 192.168.131.20
Router IP: 192.168.131.100
Pswd: mybotshop23
-----------------------------------------------------
Husky-xARM6-Gripper-Drivers
-----------------------------------------------------
HXG status: sudo service hxg status
HXG start: sudo service hxg start
HXG stop: sudo service hxg stop
HXG restart: sudo service hxg restart
View robot: roslaunch hxg_viz view_robot.launch
-----------------------------------------------------
Robot Startup
The startup job launches two main components:
- Husky base drivers
- Phidgets IMU driver
The launch file system_bringup.launch in the ros_ws package of hxg_startup includes everything which is being launched at the startup.
The Husky ordinarily utilizes Clearpath startup job unless otherwise specified. In this robot, we have our own upstart job for the custom auxiliary drivers. In case there is an issue with the robot not starting up. One can ssh into the Husky and verify if the startup job is working correctly.
sudo service hxg status
The red marker in the service indicates that the startup job has failed. Green indicates everything is operating correctly. Grey indicates that the service has not started yet. In case of red or grey marker, you may restart the service via:
sudo service hxg restart
New launch files and nodes can be added to the startup job by inserting them into the system_bringup.launch launch file for PC startup. Once added Run the following in ros_ws.
rosrun hxg_startup startup_installer.py
It should now run with the updated additions.
Configuration
###### Sensor Information
export HUSKY_LOGITECH=1
export HUSKY_IMU_RPY='3.1416 0 0'
export HUSKY_IMU_XYZ='0.19 0 0.149'
# Add HXG Environment
export HXG_XARM_IP='192.168.131.5'
export HXG_REALSENSE=0
export HXG_OUSTER_LASER=0
export HXG_OUSTER_IP='192.168.131.20'
export HXG_OUSTER_HOST='192.168.131.1'
# ROS Environment Variables
export ROS_MASTER_URI=http://192.168.131.1:11311/
export ROS_IP=192.168.131.1
export ROS_HOSTNAME=192.168.131.1
The configuration file is located in hxg_startup/config/setup.bash. The important information is that the variables HXG_REALSENSE=0 and HXG_OUSTER_LASER=0 can be used to enable the roslaunch files. If the values of 0 are replaced by 1, it will enable the launch files for the realsense camera to turn on e.g. HXG_REALSENSE=1 (The file must also be source e.g.: source setup.bash). This will also enable it to start on the robot startup if the following command is executed.
rosrun hxg_startup startup_installer.py
Please note that it is not recommended to keep the sensors on as they take time to startup and cause the startup job to fail. If this happens you can simply restart the service. As described above.
xARM6 | Robotiq 2f-140 (Robotic ARM | Robotic Gripper)
The xARM6 driver and robotiq drivers can both be turned on and used with moveit with the following:
roslaunch hxg_arm6 xarm6_robotiq.launch
This launch file includes the custom moveit setup for the Husky and the xARM6.
Ouster (Lidar)

The Lidar drivers are started via:
export HXG_OUSTER_LASER=1
roslaunch hxg_lidars lidars.launch
Intel Realsense D405 (Depth Camera)
The Lidar drivers are started via:
export HXG_REALSENSE=1
roslaunch hxg_realsense_cameras wrist_camera.launch
Phidgets (Inertial Measurement Unit - IMU)

The provided Husky has a phidgets IMU integrated into it. The parameters for odometry can be tuned in the folder ros_ws/src/mbs/hxg_control/config/wheel_localization_config.yaml.
It is recommended not to change the parameters without a backup and without expert supervision.
Issues
In case of any issues please first try restarting the service of the robot via:
sudo service hxg restart
In case of questions please contact support@mybotshop.de. For issues related to the software please attach a ros bag e.g.
rosbag record -a