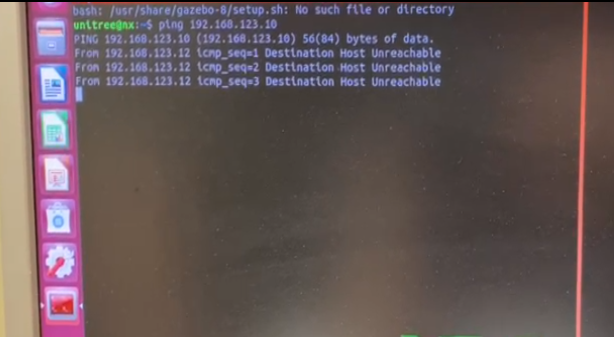
We are from RWTH Aachen University. We have some problems with our A1. We cannot connect to the robot’s SDK, and we are unable to receive a response when we ping the main control board. There is also a problem with the right front leg pressure sensor. It is not measuring logical data. Therefore, the robot cannot stand up.
We contacted the manufacturers. They advised us to buy a new main control board, calf motor, leg bar, and foot force sensor. Before buying all of them, we want to be sure about the problem. We don’t want to regret after purchasing all these components if there is a simple solution like a loose cable. We are appreciated if you could give us advice to solve our problems.
Could you please tell us if the components were working before, and if this issue occured after performing some moves?
If so then indeed it could be that the A1 has loose cables/components. If it has been operating for a long time, it may also be the case that one of its electrical components have sustained damage due to overheat. We need more information on the robots prior state to better guide you.
Thank you for your response. The robot was purchased two years ago. I joined the university last year. I am unable to provide information about times prior to my joining the organization. However, the group members indicated that the robot was not routinely operated. After I joined the team, we conducted several experiments, and following one of these experiments, the robot had trouble standing up. I believe the issue with the right foot force sensor began at that point. Prior to this, there was no problem. For the SDK issue, we have never been able to establish a connection. Hence, we have always used a remote controller to operate the robot.
One thing that I can confirm is that the A1 foot sensors overtime do start to fail occasionally which disrupts the rest of the system. In this case I would say to proceed with getting the replacements as there is no software solution for the A1 foot sensor getting damaged and it effects the startup of the A1.
Also, I cannot deduce based on your information that the change of the A1 foot sensor would solve the issue, hence, the safer option would be to acquire the entire set of replacements.
As for the A1 SDK, you can follow the guide on our docs which somewhat eases the process of control of A1 via ROS.
Thank you for your advice. We attempted nearly everything for SDK, but nothing worked. I believe this is due to a problem with the main controller board. We will definitely replace it.
Do you have assembly instructions or a video for the replacement calf motor, leg bar, and foot force sensor? After purchasing it, this would be helpful to us for assembling our robot.
Your location is near Aachen (approximately 70 kilometers away). Is it possible to receive in-person support? Do you offer this particular service?
I think you are the distributor of Unitree robots. Could you provide these components (the main controller part and the replacements for the right leg)? If so, could you inform us about the prices?
A personal meeting is a bit difficult at the moment due to holiday season - Nevertheless we are happy to provide the needed spare parts / repair the robot for you. The motors can be found here: QUADRUPED A1 Smart Actuator, 800,00 € A manual how to exchange them is unfortunately not available, but it is very straight forward. The controllerboard can be requested at info@mybotshop.de but it is quite expensive (around 3000€), therefore I would think about mounting an NVIDIA Kit, e.g. the new ORIN NANO: Nvidia Jetson Xavier Maschine Vision | MYBOTSHOP.DE on the back of the robot.