
Hi,
I just installed the qre_go2, but something different from what the docs shows
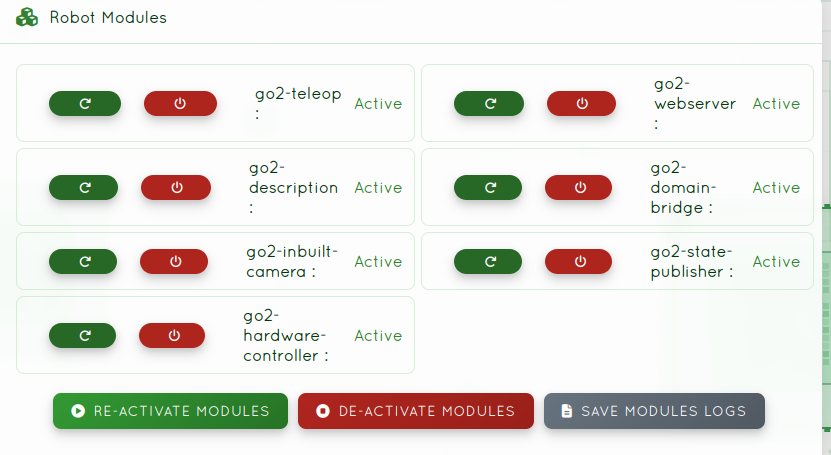
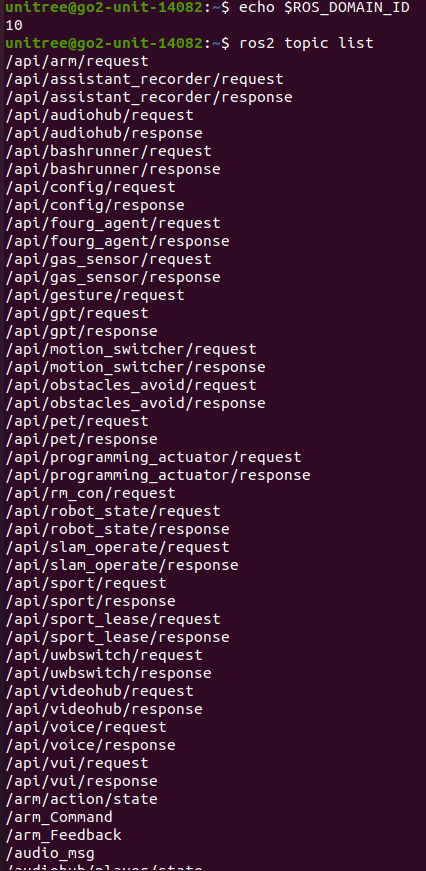
1.The ros2 topic in ROS_DOMAIN_ID=10 are the same with default ROS_DOMAIN_ID(already actived all the modules in web-server and ros2 launch go2_navigation slam.launch.py):

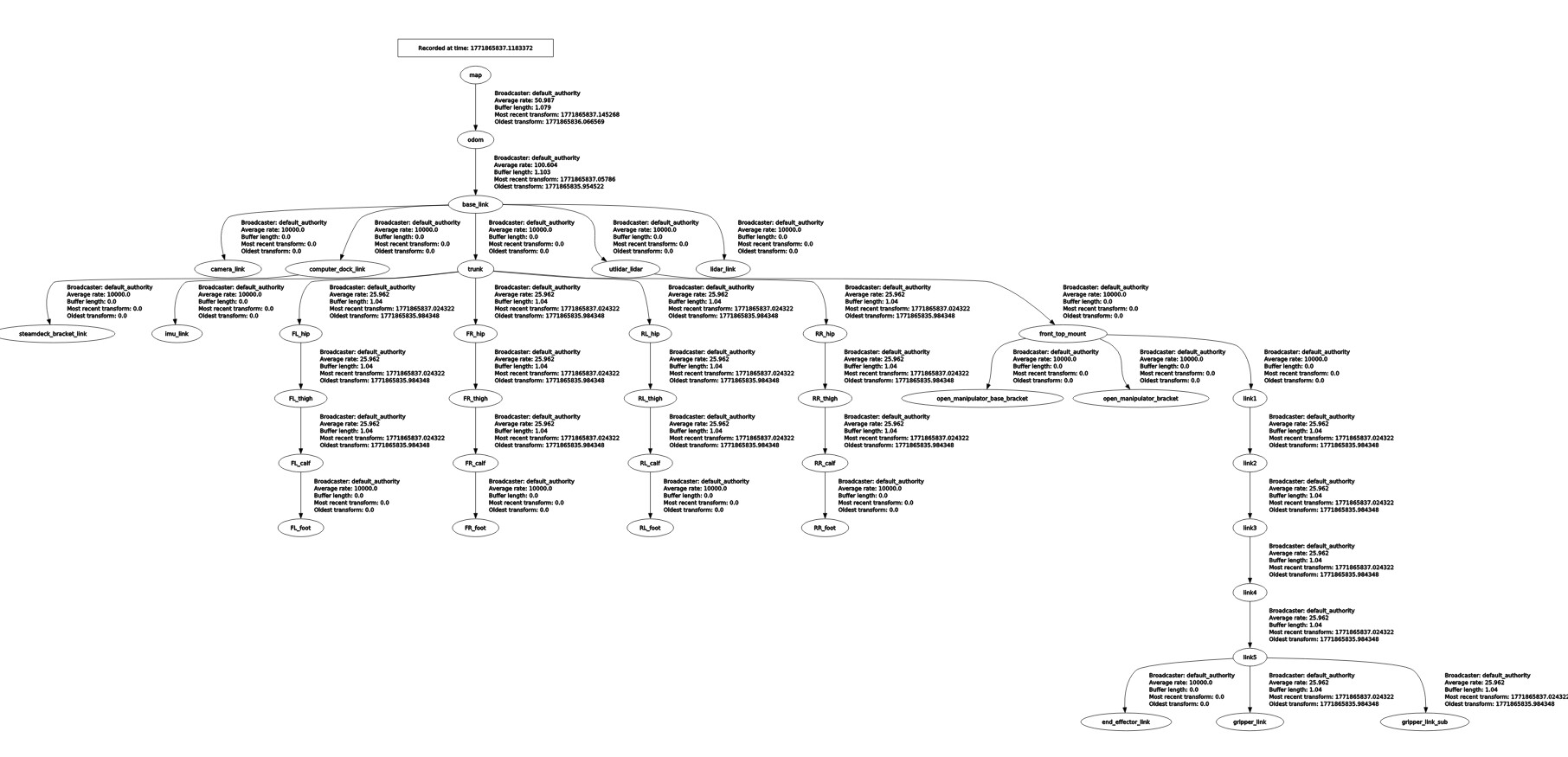
2.the TF tree seems to be normal(ROS_DOMAIN_ID=10 ros2 run rqt_tf_tree rqt_tf_tree --force-discover --ros-args --remap tf:=/$GO2_NS/tf --ros-args --remap tf_static:=/$GO2_NS/tf_static) :
3.only the robot shows in rviz(ros2 launch go2_navigation slam.launch.py+ ros2 launch go2_viz view_robot.launch.py):

So what is wrong with it?