Hallo!
Als Neuling in diesem Forum hoffe ich die richtige Kategorie gewählt zu haben.
Mein Problem:
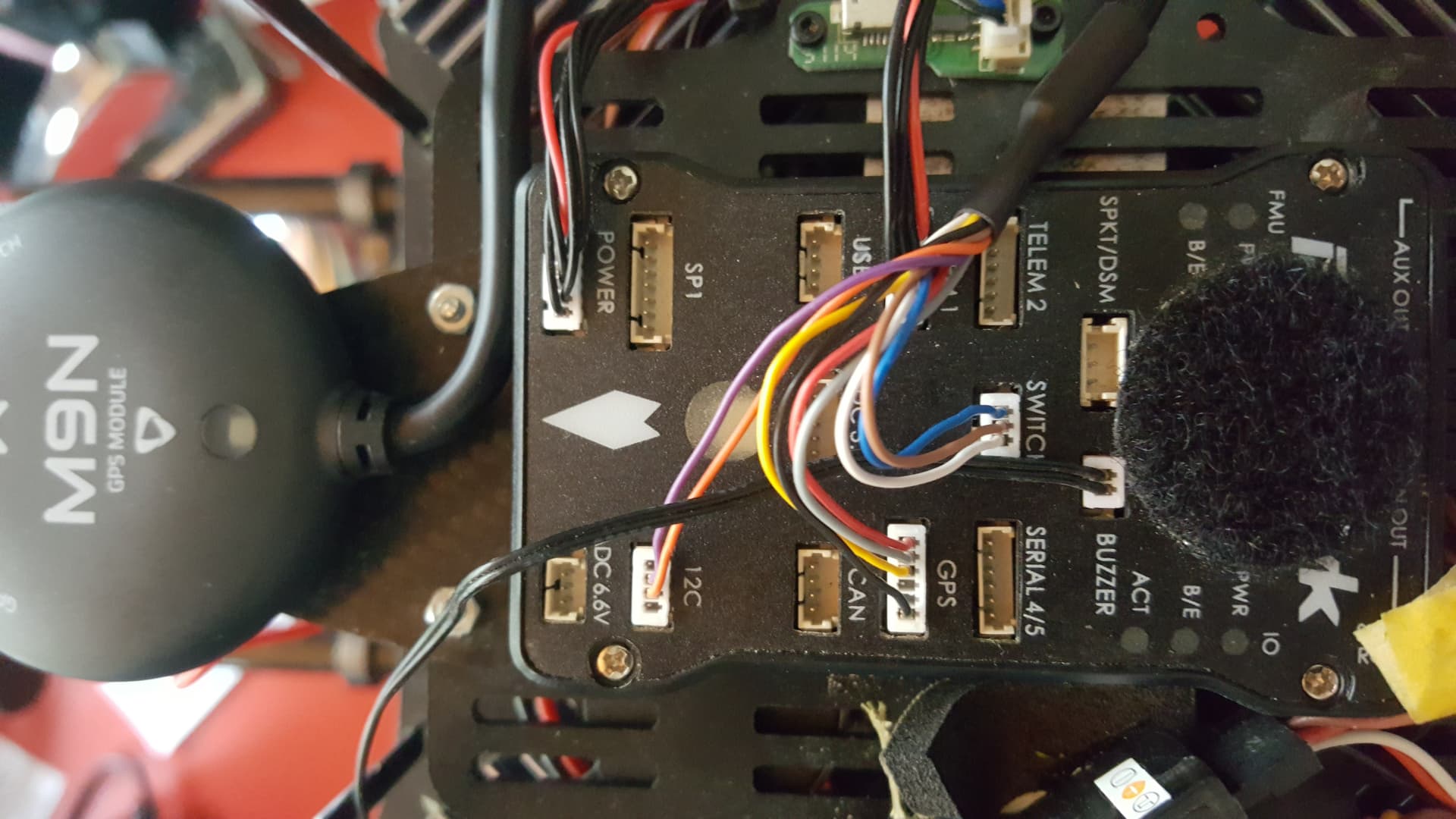
Ich betreibe einen Quadcopter mit o.a. FC. Nach scheinbaren GPS-Problemen habe ich die GPS-Antenne gewechselt.
Die alte Antenne war eine Ublox Neo-M8N GPS with Compass von Hobbyking.
Die neue Antenne ist eine Holybro M9N GPS Molex 1.25mm 6Pin 4Pin 3Pin.
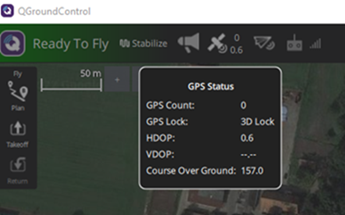
Wird der Autopilot gestartet (per USB mit dem PC verbunden oder alleine mit Akku) und ist mit QGround oder MissionPlanner verbunden, wird der GPS-Status nicht in der Bodenstation angezeigt.
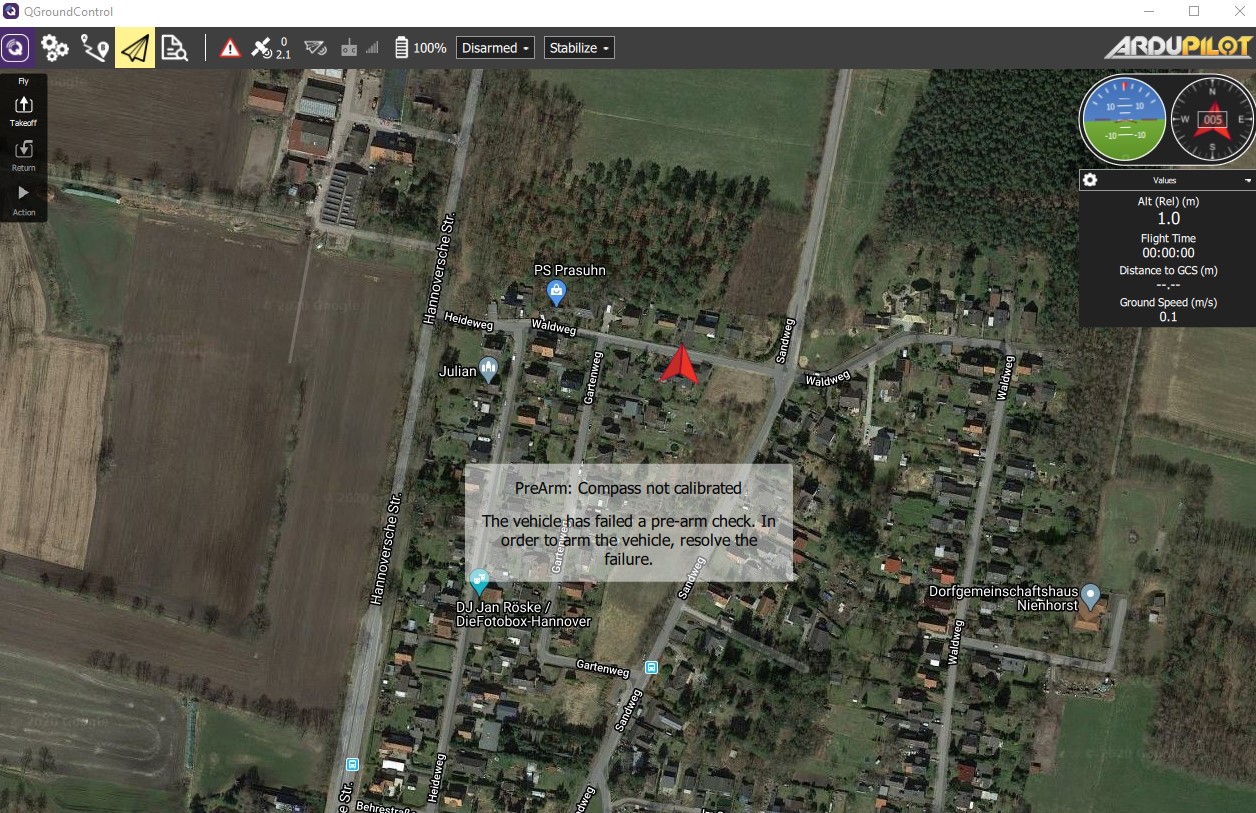
Am Autopiloten selber blinkt die Kontrollleuchte grün und in den Bodenstationen wird die korrekte aktuelle Position und Richtung angezeigt. (Die Warnung zur Kompass-Kalibrierung ist behoben und erscheint nicht mehr.)
Welche Einstellungen müssen geändert werden, damit eine korrekte Anzeige erfolgt?
Beim Start des Copters ist kein Wechsel des Flight-Modes auf Altitude hold und/oder Position hold möglich, auch wird die programmierte Mission nicht abgeflogen.
QGC ist Version 4.2.3,
der FC hat die Firmware Version 3.3.3
Ich hoffe diese Angaben reichen um mir einen Lösungsweg vorzuschlagen und bedanke mich im Voraus für jede Hilfe!
Hallo,
danke für den Hinweis!
QGC ist die neuste Version (v4.2.3, so mir bekannt), den FC möchte ich nicht updaten, da dann die Param-Daten nicht mehr passen.
Aber warum wird in QGC die Position angezeigt, aber kein GPS-Status? (siehe Bild 1 und 3)
Grüße
Detlef
Der gleiche Fehler trat auch bei der älteren QGC-Version v3.5.2.
Hallo,
nach dem Hinweis vom Support habe ich mal die Releasenotes der FW studiert:
Copter 3.6.10-rc1 08-Jul-2019
Changes from 3.6.9
EKF improvements:
a) learns biases even for inactive IMUs
b) EKF uses earth magnetic field model to reduce in-flight compass errors
c) EKF switches to first healthy IMU when disarmed
d) IMU fix for dropped samples during high CPU usage
e) Optical flow fusion start fix when some gyros disabled 2) Ublox F9 GPS support
Integrated CPU Watch Dog for STM boards including logging of reset reason
ChibiOS I/O firmware for ChibiOS builds to support Spektrum binding
Auxiliary switch changes always logged
CUAVv5 Nano LED fix
Solo Gimbal fix when some gyros disabled
Der Fehler lag also im FC. Ab FC v3.6.10 sollte alles wieder funktionieren. QGC funktioniert in allen Versionen.