Hallo!
Wir sind aktuell dabei unsere Abschlussarbeit zu schreiben und bauen dabei einen Kat der mit dem Ardupilot gesteuert werden soll. Dafür verwenden wir den Pixhawk und die QGroundControll. Leider wissen wir im Moment nicht weiter, da unsere RC (Remote-Controll mit der Spektrum DX6e) nicht funktioniert.
Das erste Problem ist, dass wir nicht wissen welchen Empfänger wir verwenden sollen, und ob wir dafür einen Encoder brauchen?
Das zweite Problem ist, dass die Motoren beim Test nicht anlaufen und wir nicht wissen wieso?
Ich hoffe ihr könnt uns mit den Screenshots von unten helfen!
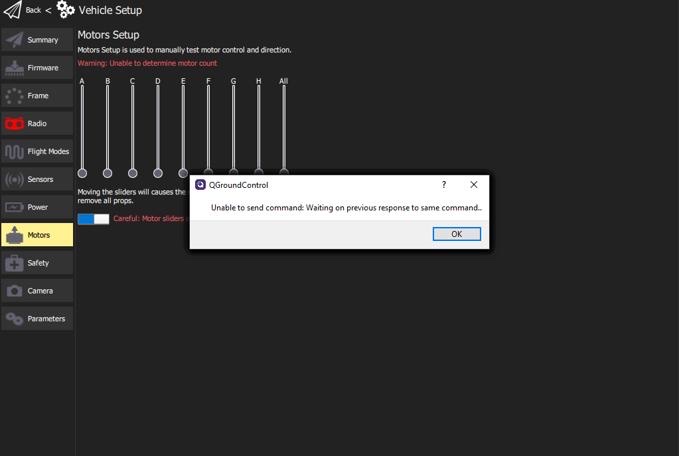
Das ist der Fehler den die QStation ausgibt:
[image]
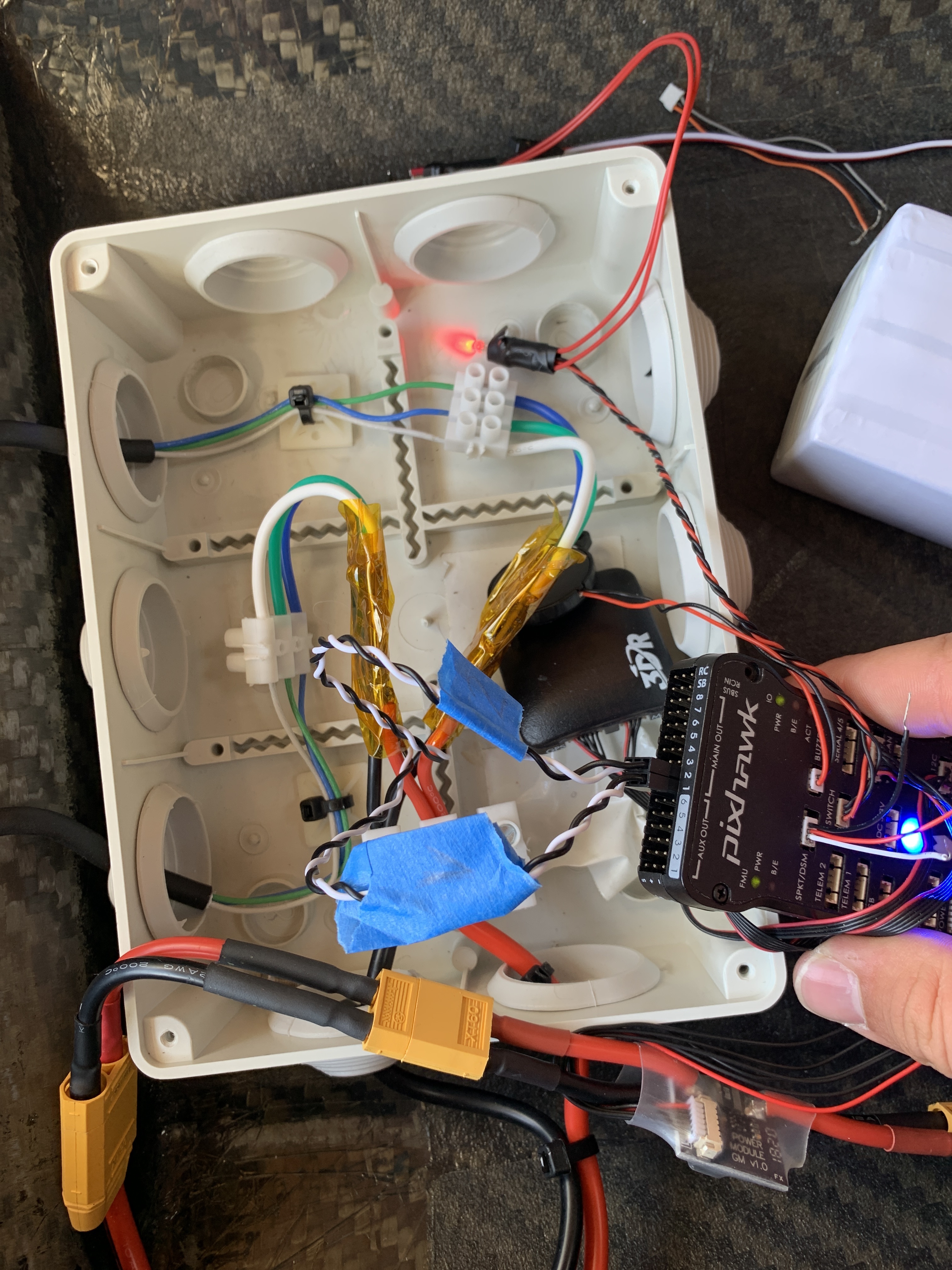
Könntest Du bitte noch ein Foto posten, wo zu sehen ist, wie Du die ESC’s bzw. an welchen Port diese angeschlossen wurden?
Wird die Rover Firmware verwendet? Ardupilot oder PX4?
Uploading: image.jpg…
Ich verwende QGroundControll und habe dort sie RoverSoftware ausgewählt. Wissen Sie zufällig an welche Anschlüsse ich den Spektrum AR8020T anschließe?
LG