Hello Forum,
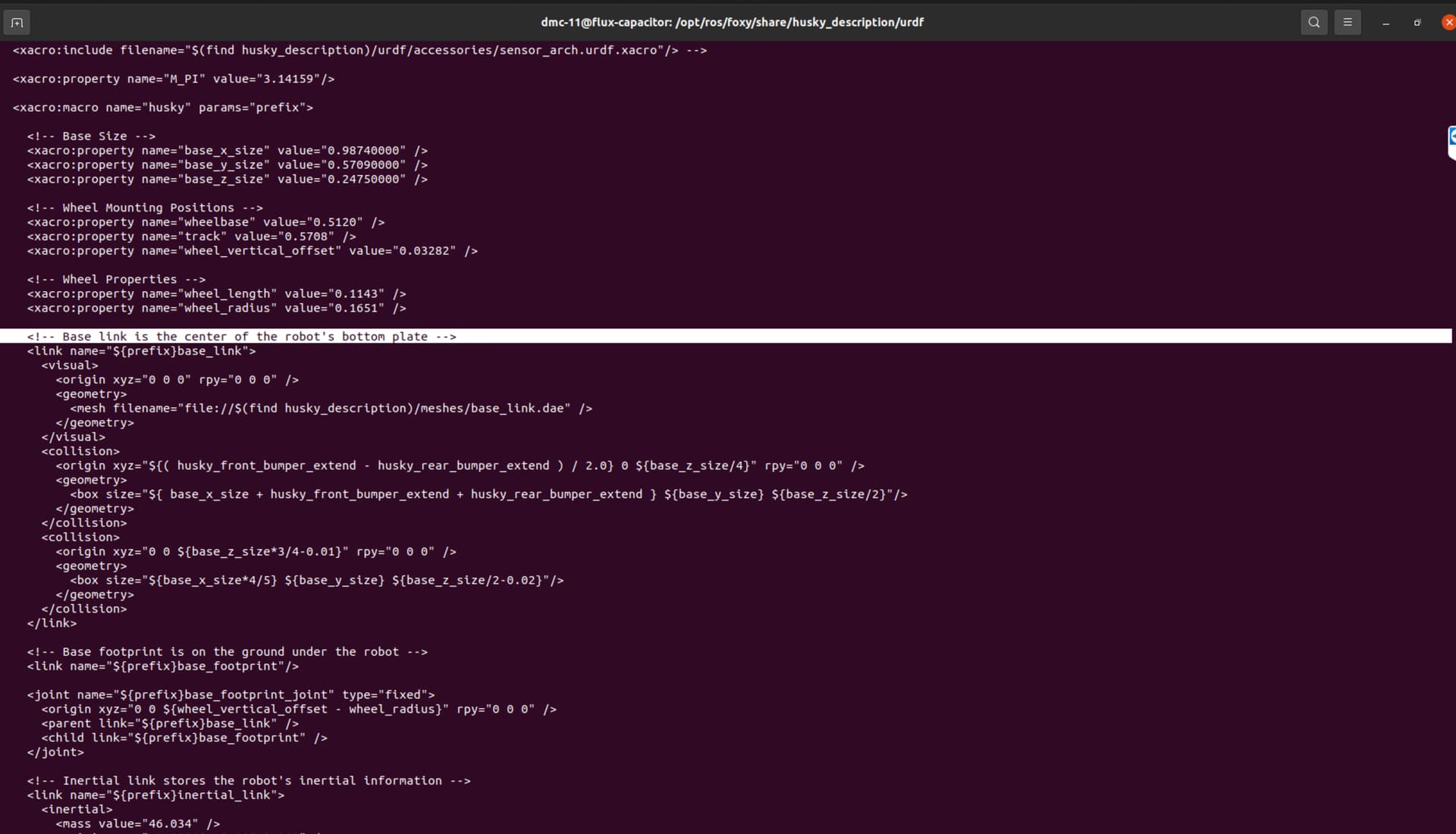
I would like to adjust the tf-tree of our Clearpath Husky in ROS2 according to our current sensor setup. Everything so far is related to “base_link” and I am searching for a description where this base link is physically located. Nothing can be found in the husky documentation, the only hint is the urdf file with the comment “Base link is the center of the robot’s bottom plate” and some calculations. From the later ones I figured, the base_link seems to be in the middle of the robot, and in 1/4 of the height (measured from the ground?) of the base. Does that sound right?
Any help would be appreciated!