We are trying to run slam on A1 mapper as per your guidelines which are showing once we are connected to jetson board.
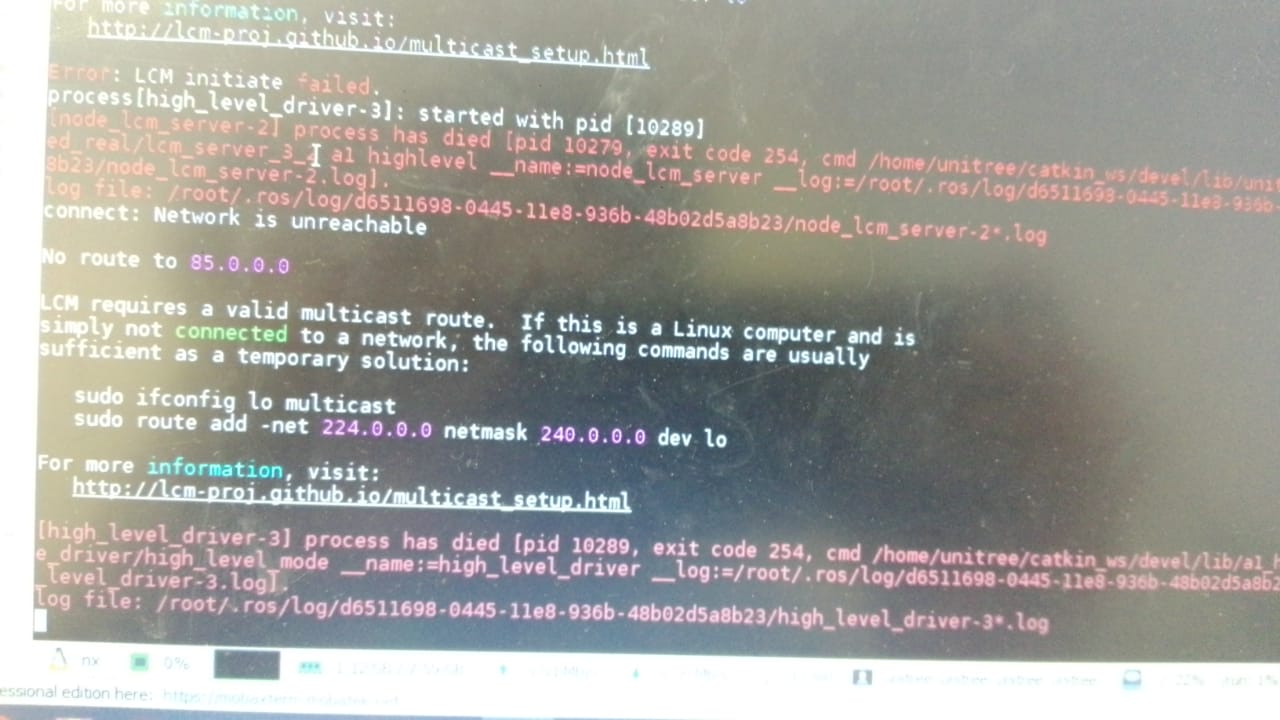
When i execute roslaunch command for higher level controller, it giving error as shown in image i.e; no route for 85.0.0.0 (for LCM multicast)
After executing second command, which is providing imi, odom , joint position data etc on ROS giving error as follow:
No imu data for A1
No joint position data.
These are above two issues we are facing while executing SLAM
At times the network configuration is reset. Please run the following as suggested in the error:
sudo su
source ~/catkin_ws/devel/setup.bash
sudo ifconfig lo multicast
sudo route add -net 224.0.0.0 netmask 240.0.0.0 dev lo
Then launch the driver. When the driver is running operational the other errors of imu and joint position should not occur except on first time start up.
You should then be able to visualize the data on rviz. Also, it is recommended to run the drivers on your PC instead of the onboard Nvidia of the A1.