
My project of building workflow in virtual environment, including SLAM, path planning, robot arm manipulation, and industrial conveyor system.
Nikiro Simulation Platform is a highly integrated robotics simulation solution that not only helps beginners understand principles of simulation integration but also provides professional developers with powerful prototyping tools.
This Nikiro Platform was created by Logesh S and the reference code is available on: GitHub - logesh1516/Nikiro_simulation: Nikiro is a ROS 2-based Autonomous Mobile Robot (AMR) platform designed for indoor navigation using a differential drive system. Built with modularity and simulation in mind, Nikiro leverages Gazebo, RViz, and Nav2 for SLAM, localization, and path planning.This repo focuses on the simulation of the mycobot and amr..
Core Functions
1. SLAM & Mapping
The system integrates advanced SLAM algorithms enabling the robot to:
● Build environmental maps in real-time
● Accurately localize its position
● Handle dynamic obstacles
● Support large-scale indoor environments
2. Intelligent Navigation System
Nav2-based navigation system provides:
● Dynamic Path Planning: Real-time optimal path computation
● Smart Obstacle Avoidance: Handling static and dynamic obstacles
● Goal Tracking: Precise arrival at designated locations
● Recovery Behaviors: Automatic handling of navigation difficulties
3. Robotic Arm Integration
The integration of the 6 DOF robotic arm myCobot brings:
● Precise motion control
● Pick and place operations
● Coordinated control with mobile platform
● Complex manipulation task execution
4. Industrial-Grade Conveyor System
Unique conveyor simulation features:
● IR sensor automatic detection
● Variable speed control
● Multi-object handling capability
● Complete automation workflow
Environment Setup
Ensure your system environment :
● Ubuntu 20.04/22.04
● ROS2 Humble/Galactic
● Gazebo Classic
● Required Python dependencies
Quick Start Guide
1. Project Clone & Build
mkdir -p nikiro_simulation/srccd nikiro_simulation/srcgit clone https://github.com/logesh1516/Nikiro_simulation.gitcd ..colcon build
2. Basic Simulation
Launch Gazebo environment:
cd nikiro_simulationsource install/setup.bashros2 launch amr_description gazebo.launch.py
This step loads the complete AMR model, myCobot model and simulation environment.
3. Mapping Practice
Start SLAM mapping:
ros2 launch amr_description mapping.launch.py
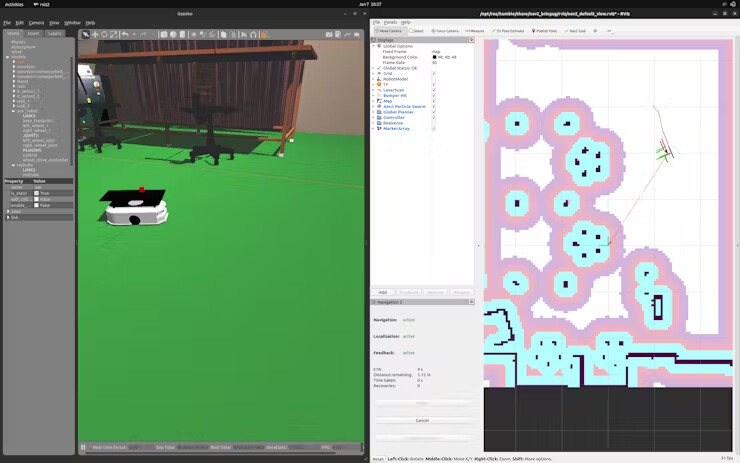
Use keyboard or gamepad to control the robot moving through the environment, observing real-time map building process.
4. Autonomous Navigation Test
Launch Nav2 navigation system:
ros2 launch amr_description nav2.launch.py
Set goal points in RViz and observe the robot’s intelligent navigation behavior.
5. Conveyor Basic Simulation
cd ~/colcon_wssource install/setup.bashros2 launch conveyor_description conveyor_model.launch.py
Add Objects:
ros2 service call /CONVEYORPOWER conveyorbelt_msgs/srv/ConveyorBeltControl "{power: 50}"
Activate Conveyor:
ros2 service call /CONVEYORPOWER conveyorbelt_msgs/srv/ConveyorBeltControl "{power: 50}"
Automated Control:
ros2 run conveyor_automation conveyor_automation_node
6.Robotic Arm Control
Launch myCobot 280 Simulation:
ros2 launch mycobot_gazebo mycobotjn_control.launch.py
Execute Pick-and-Place Tasks:
ros2 run mycobot_gazebo pick_and_place
Advanced Feature Exploration
ros2 run mycobot_gazebo pick_and_placeReal-World Application Scenarios
1. Education & Training
● Robotics course experiments
● SLAM algorithm learning
● ROS2 development training
● Multi-sensor fusion teaching
2. Research & Development
● New algorithm validation
● System integration testing
● Performance benchmarking
● Proof-of-concept prototyping
3. Industrial Applications
● Warehouse automation design
● Production line robot planning
● AGV path optimization
● Human-robot collaboration research
Extension & Customization Guide
The system supports various sensor integrations:
● LiDAR sensors
● RGB-D cameras
● IMU inertial measurement units
● Ultrasonic sensors
Easy creation of custom environments:
● Modify Gazebo world files
● Add custom obstacles
● Create complex terrains
● Integrate real environment models
Modular design supports:
● Different SLAM algorithms
● Custom path planners
● Machine learning integration
● Computer vision modules
Manipulation Module:
● 6 DOF robot arm kinematics
● Inverse kinematics solver
● Trajectory planning
● Gripper control
Automation Module:
● Conveyor belt physics simulation
● IR sensor integration
● Object detection and tracking
● Automated workflow management
Hardware Compatibility:
● Compatible with differential drive platforms
● Supports standard ROS2 sensor interfaces
● Integrates with myCobot series robots
● Extensible to other robot platforms
Conclusion
The Nikiro Simulation Platform provides robotics developers with a comprehensive, easy-to-use development environment. Through this guide, you should be able to successfully set up and run the Nikiro simulation system and quickly start your myCobot 280 simulation journey.
This platform represents more than just a simulation tool, it’s also a gateway to understanding modern robotics systems, from fundamental concepts like SLAM and path planning to advanced topics like multi-robot coordination and industrial automation. The modular architecture ensures that you can start simple and gradually add complexity as your understanding and requirements grow.