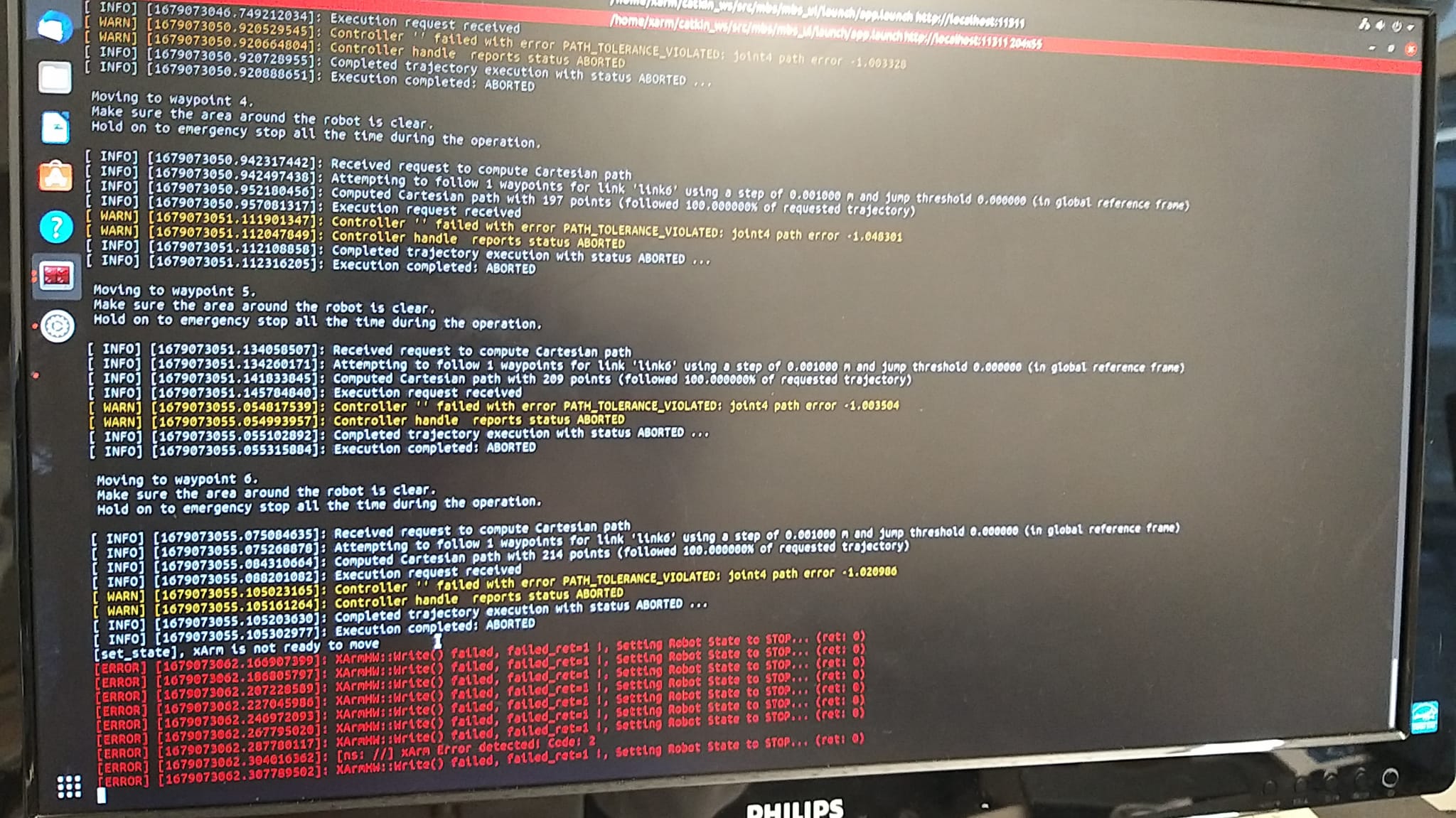
Hi, I am trying to create a smooth trajectory that will exert a constant force of 1 N in the Z direction (i.e., downwards force) and move a combination of X and Y direction (rotary motion) on upon contact with a surface. However, it seems that I could not really get the optimum parameters set for error scale and goal tolerance as the xarm was bobbing up and down as it moves along the waypoints. I also get the following path error on my command window.
In addition, I do have a paintbursh attached on a acrylic plate at the end of the force sensor (see picture) which we manufactured ourselves following the DIN of the force sensor/robot.
@xqcheng can you please do the following and share the data:
Before running anything, in a shell run the following command:
roscore
In another shell run:
rosbag record -a
In another shell run the command which you usually do to operate the robot. After everything is running do all the operations, waypoints motion everything which you want.
At the end close everything and press Ctrl C for shell 2 where you’ve run rosbag record -a. After this, a .bag file will be recorded. Please share to support@mybotshop.de and hopefully I will be able to help.
@xqcheng Can you please update in case the same behaviour is happening in case you run the same waypoints again?
Also, I can see from the data shared the robot is going to state 4 which means the robot is not ready for motion. Can you tell me what has happened, maybe you have hit the emergency stop.
Moreover the error in you attached screenshot as well as in the bag file:
name: "/xarm_interface"
msg: "XArmHW::Write() failed, failed_ret=1 !, Setting Robot State to STOP... (ret: 0)"
file: "/home/xarm/catkin_ws/src/third_party/xarm_ros/xarm_controller/src/xarm_hw.cpp"
function: "XArmHW::need_reset"
@Tahir Yes the same behaviour is happening again when I run the same waypoints (as show in the video I sent). I pressed the emergency stop as otherwise the xarm will collide into the movable rack that it is mounted on (I think you can see that from the last section of the video, that’s when I pressed the emergency stop button).
Hi Tahir, sorry just to check, are you still waiting for some input on my end? So to clarify, the emergency stop is not the issue I am running into here. It was more of errant behaviour on the end of the robot in motion based the the waypoints collected since my waypoints were in a combination of the x and y direction and defnitely not up and down. Thanks so much for helping!