DISCLAIMER: Please note, the Training will be recorded for future use!

Dear Sir or Madam,
I am contacting you today, to offer the possibility of attending our free of charge ROS Training.
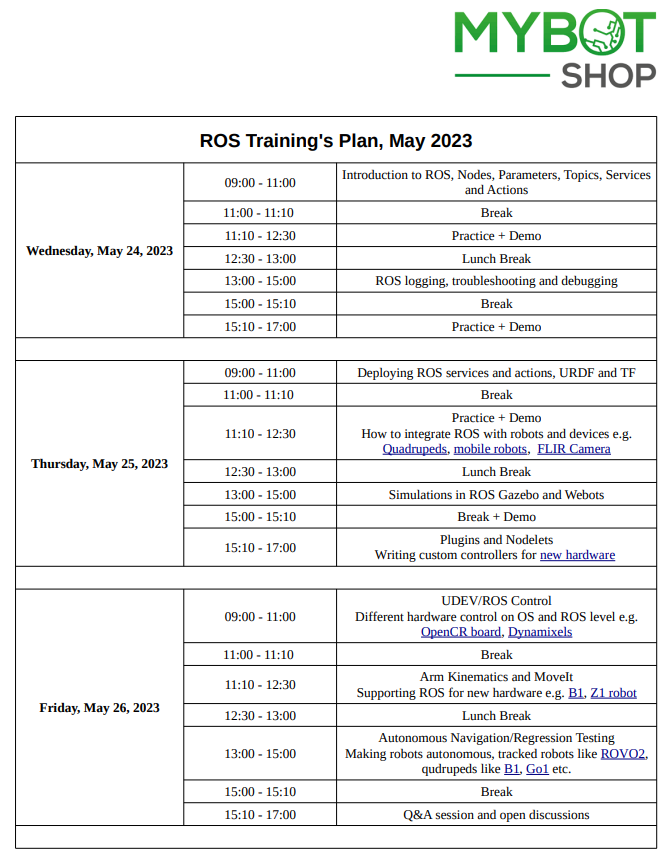
Because we already have ROS Trainings prepared, which were held several times in the past, we would now like to arrange a free of charge 2 days online ROS Training, where everybody who is interested can be attend! It should be from 24th until 26th of May. The first two days will cover ROS Basics while Friday will be for already familar users!
In case of being interested in it, please send us a short reply to training@mybotshop.de. You will receive a survey link, where you can choose the dates which suits you best, and the topics which will be covered. A few days before the training will start, we will submit a roadmap on which date, at which time, which topic will be presented and explained!
May you are asking why we are doing so? It is very simple, we would like to train some of our staff as well, and thought why not making it public to everyone?!
Please feel free to redirect this Email to your friends, colleagues or Slack Group of your choice and hope to see all of you very soon in our online training ![]()