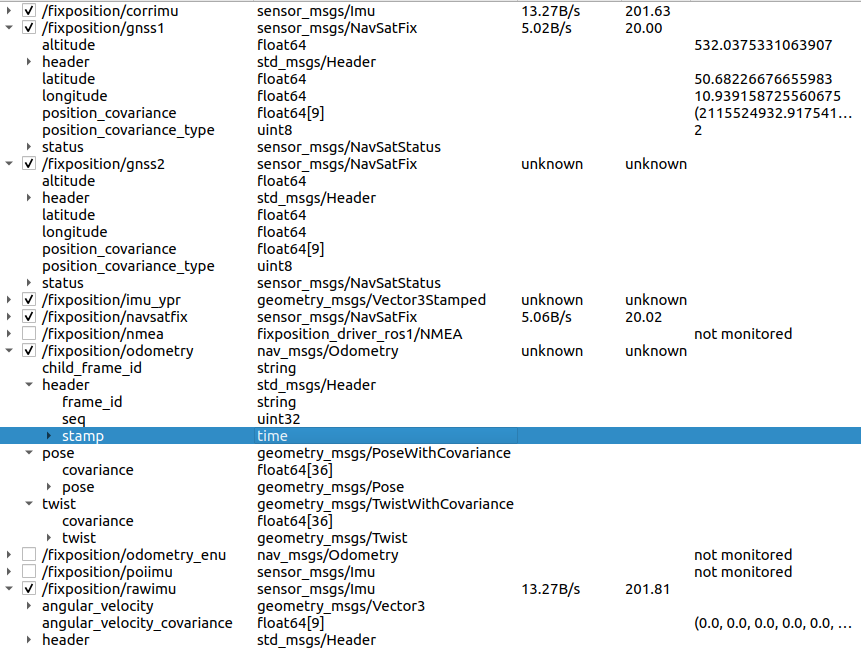
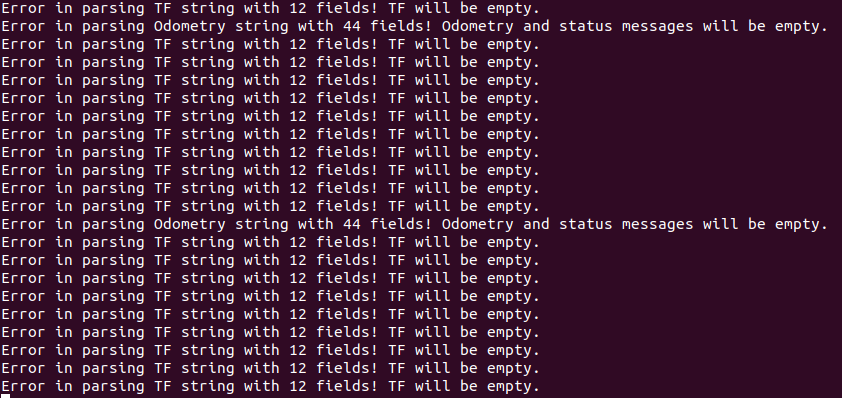
We are currently trying to use the Fixposition VRTK2 Starterkit to get the position and orientation of our robot. The webinterface shows, that the Fusion ist working and the positon fits the actual one. To use the Data for further processing, the Fixposition is connected via ethernet to a pc running the ROS1-driver-node, specified by fixposition (GitHub - fixposition/fixposition_driver: ROS Driver for Fixposition Vision-RTK 2 Visual Inertial GNSS Positioning Sensor). Unfortunately, most of the Data isnt passed out by the node to the corresponding topic. For example the gnss1 Signal is passed correctly, but the gnss2 Topic is empty. Same with the odometry. IMU Data is also passed correctly. (See first picture)
The webinterface shows, that the Fusion ist working and the positon fits the actual one.
Please go to thewebinterface for the fix position in the browser to customize the setting of the fusion and to auto-enable it. On startup, the fixposition requires an internet connection to get the RTK afterwhich if the internet connection is lost then there is no issue and it should continue to work.
Unfortunately, most of the Data isnt passed out by the node to the corresponding topic. For example the gnss1 Signal is passed correctly, but the gnss2 Topic is empty. Same with the odometry. IMU Data is also passed correctly. (See first picture)
The topics which you require can be exported from the webinterface. By default, not all topics are published.
If someone knows how to fix this problem or has some ideas about it, i would be more than thakfull.