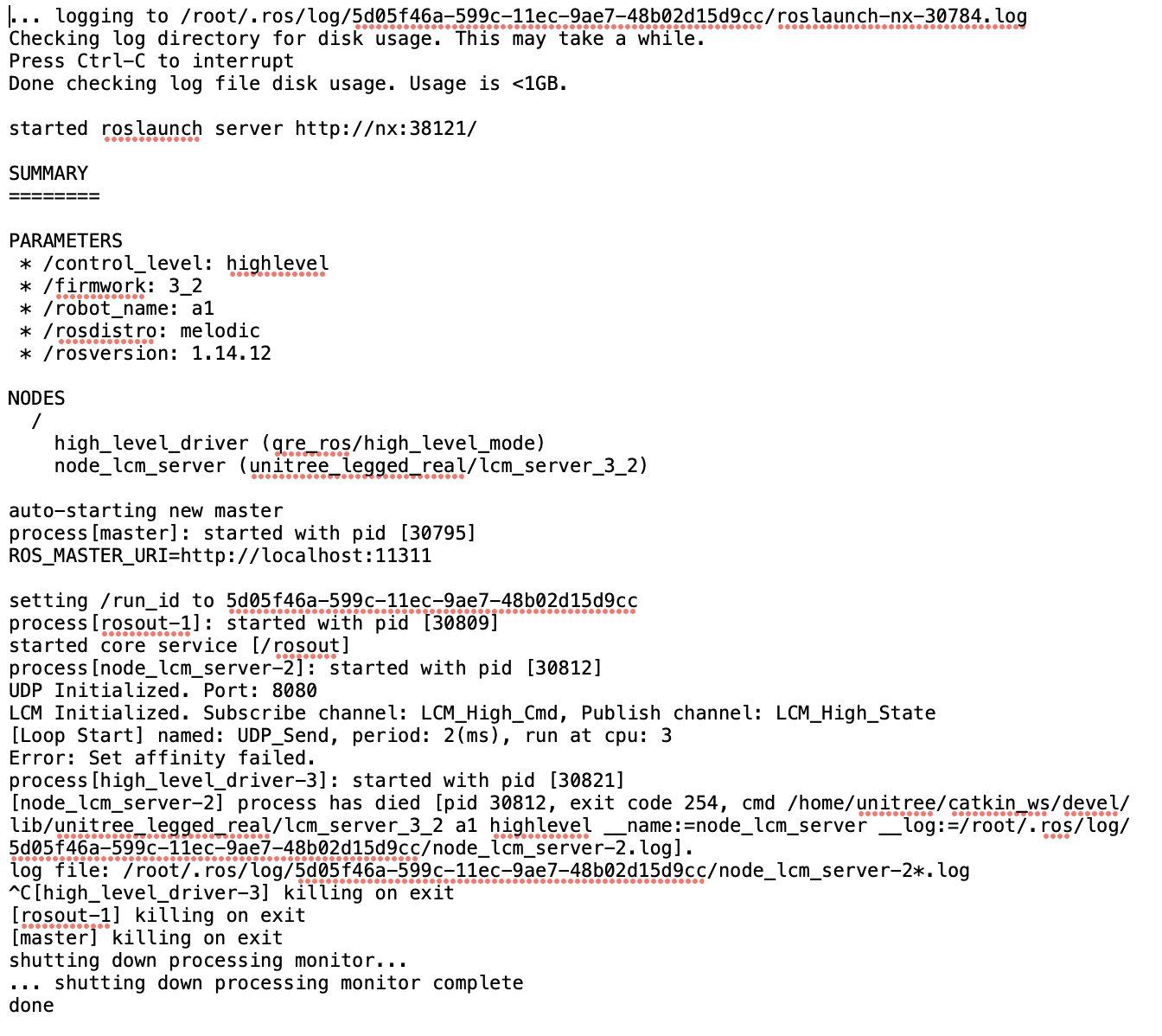
I am currently having an issue when trying to run roslaunch qre_ros high_level_mode.launch (in su mode). It used to work but I’ve had to reinstall the workspace so I used the a1_installation_script.bash. However, it is not working. Whenever I try to start the high level mode, I get a “[node_lcm_server-2] process has died” error, making it impossible to control the robot. Do you have any idea as to what might cause this and how I could fix it ?
Thank you !
PS : this is the entire log that I get if that can help.
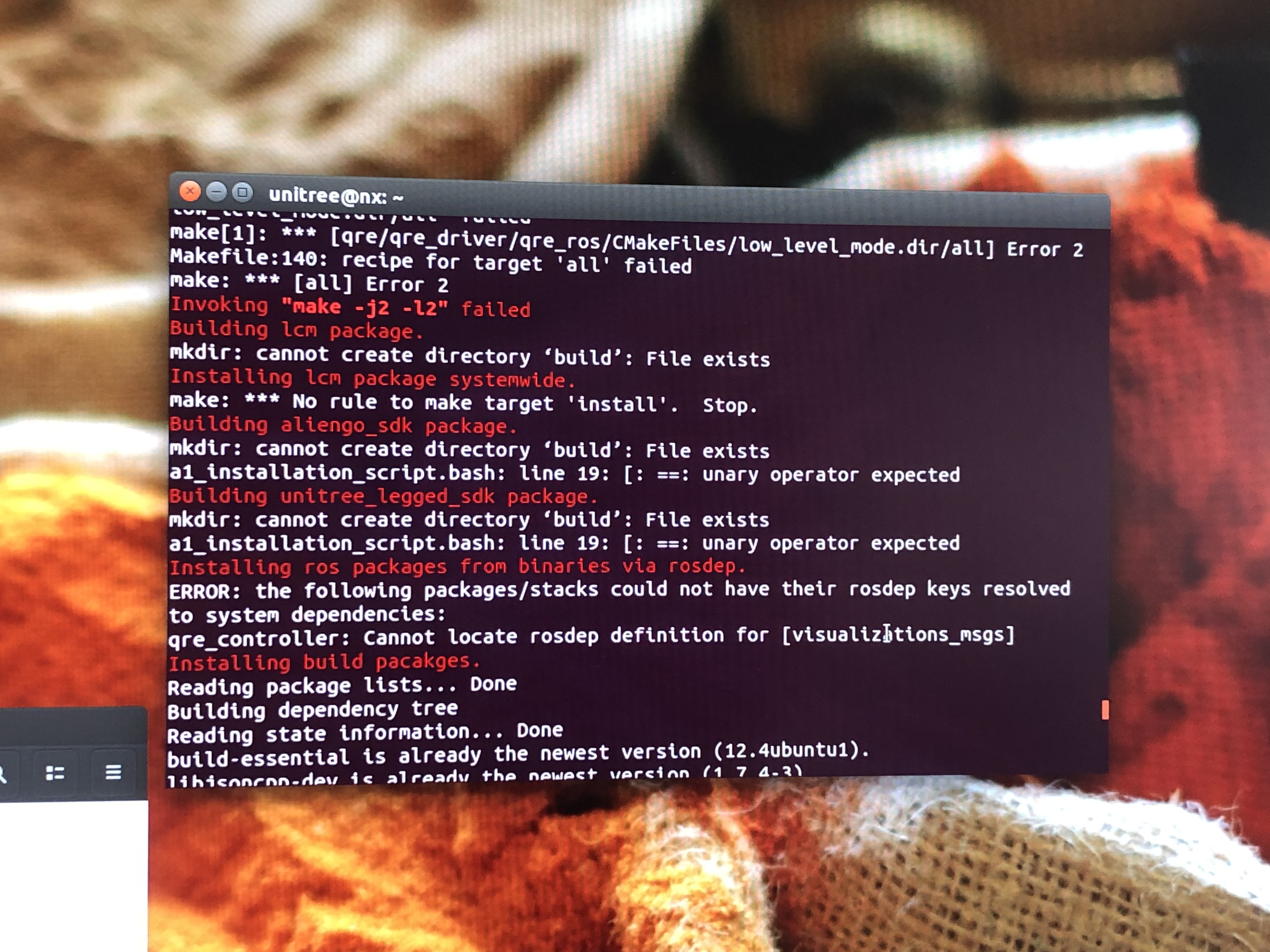
It seems that the initial qre package has not been deleted. To run the a1_installation_script.bash, you may simply delete the previous qre package along with the devel, log, and build folder of your catkin workspace (i.e. manually delete it, or run catkin clean -y) and run the bash script. Alternatively, you can create a new catkin workspace and follow the instructions to run the bash script there.
Unfortunately, yes, I have deleted the “qre” and “third_party” folders in catkin_ws/src/ but still get the same issue. Do you have any idea where it might come from ?
Do note that each time that you run the install script it builds the binary libraries like LCM system wide so if before you run the script again, you must either download the qre installation package fresh from Quadruped A1 Robot Driver — A1 Tutorials 1.0.0 documentation or manually delete the build folders in the qre installation package of the lcm, aliengo_sdk, and unitree_legged_sdk.
Also in the event that you want to update your workspace, reinstall it, or change it. Directly delete the
devel, log, and build folder of your catkin workspace (or run catkin clean -y ) and run catkin_make.
For future reference: Do not run the installation script as the installation script is meant as a one time fresh installation solution. We will update the instructions on the documentation for more clarity soon.
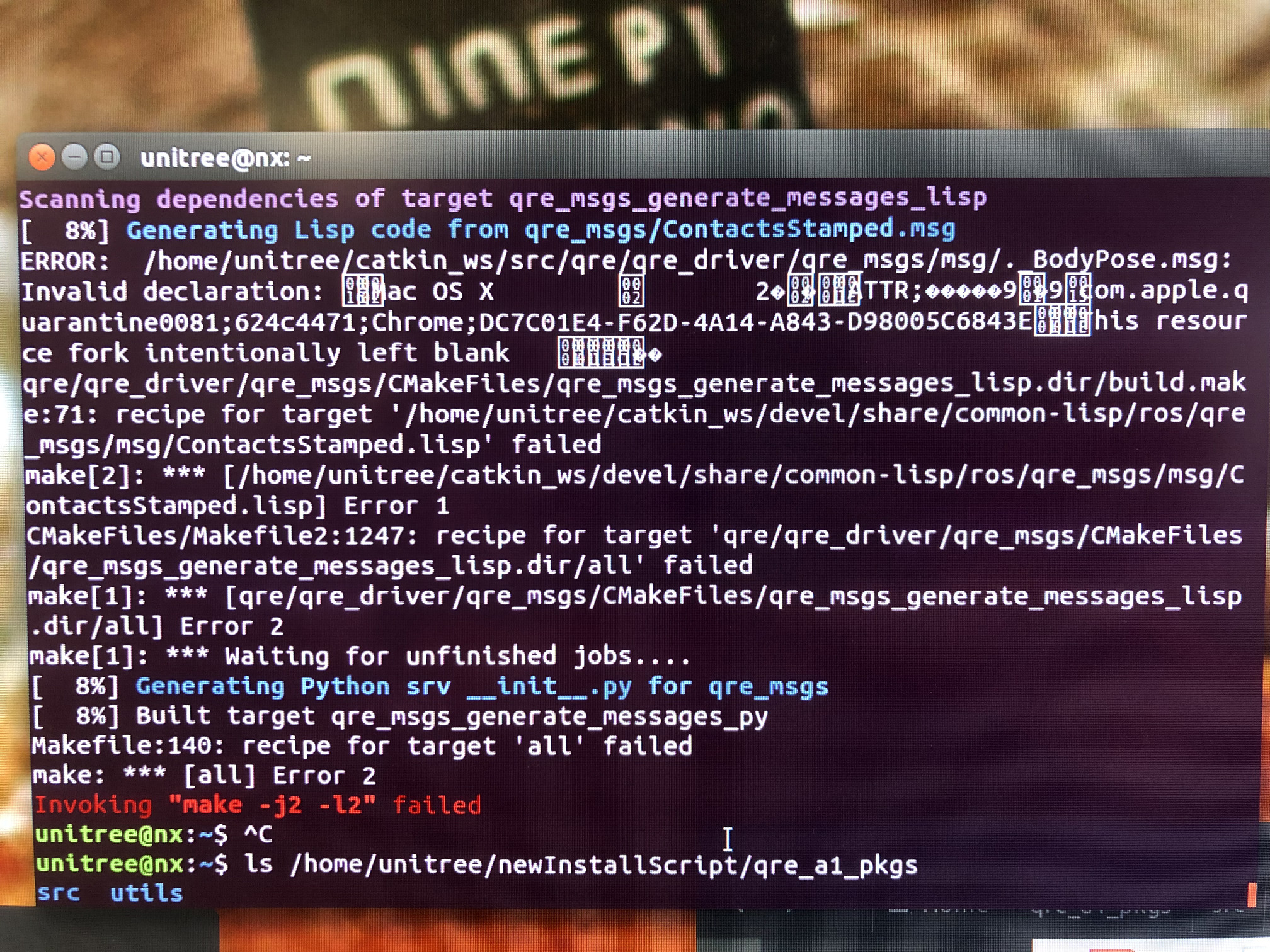
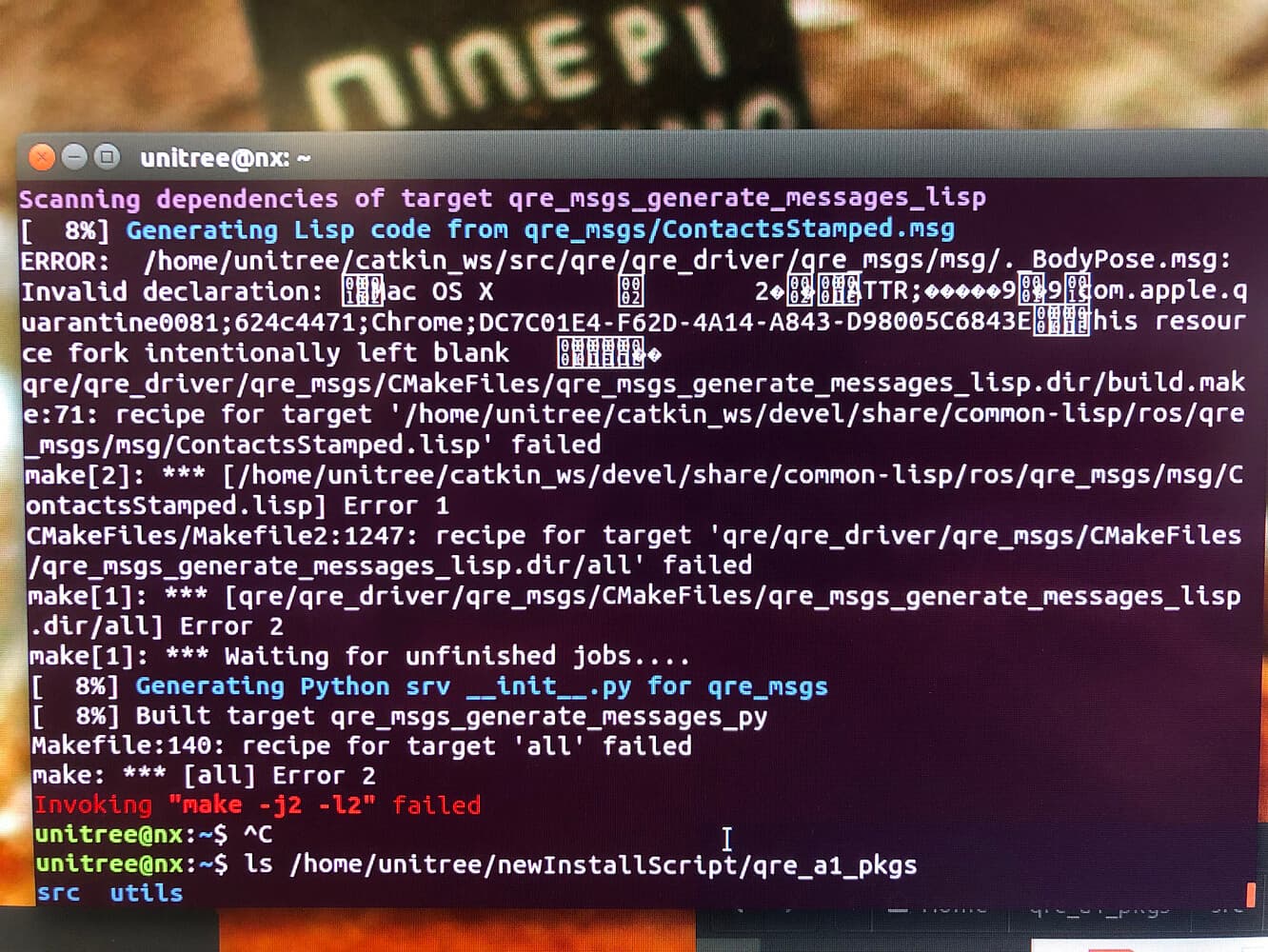
Maybe try a1 as the ws_name or something else, the errors are coming because of the installer pkg. So please reinstall the qre installer package because if it fails then the build folders are corrupted.