
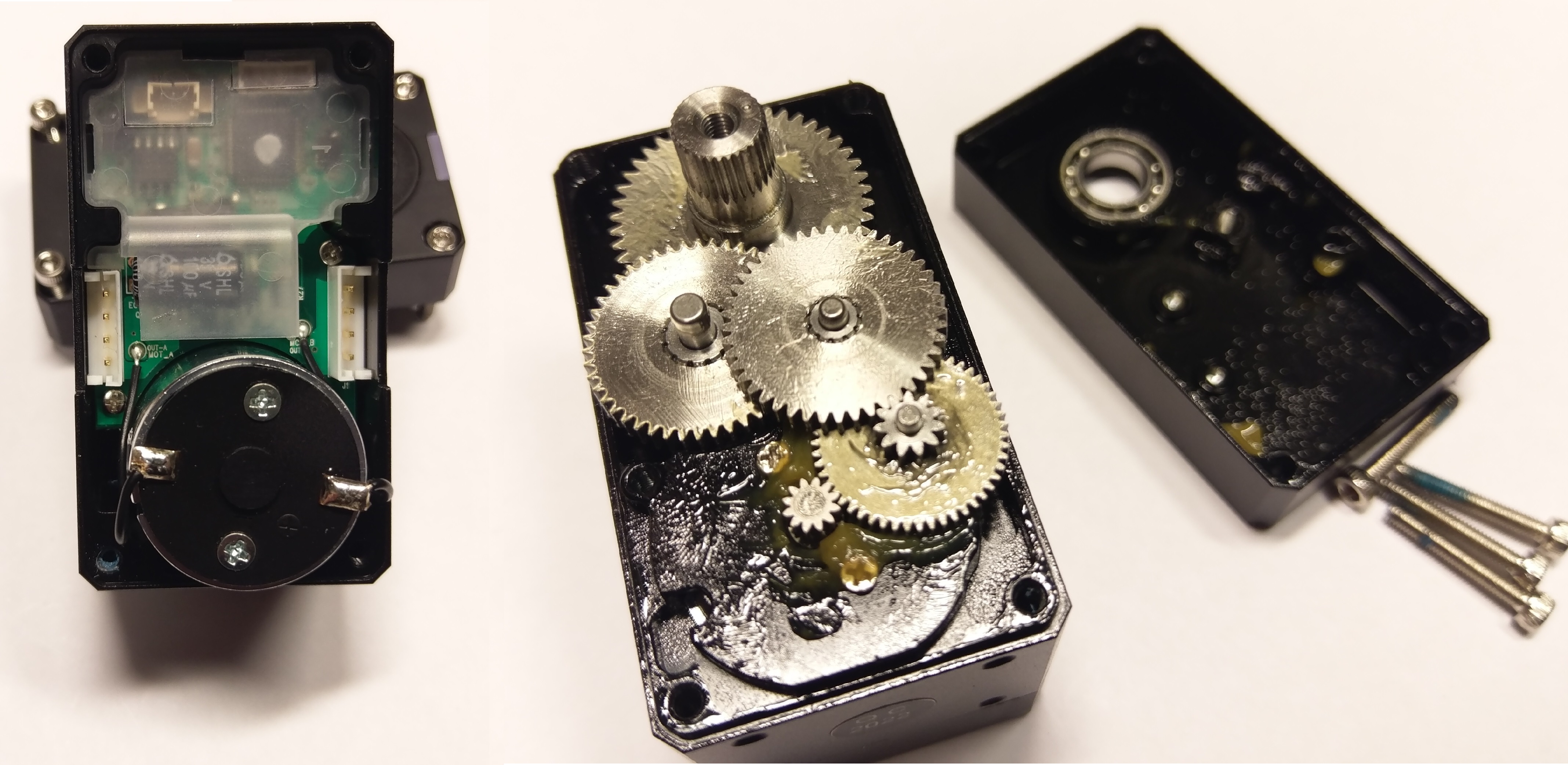
I have a some problem with servomotor XM540-W270. I loaded servo a half of nominal torque. After that servo was accelerated very fast and stop work. When I restart and set new position motor doesn’t work and after a while it show overload. Communication with servo is work correctly.
On site http://en.robotis.com/model/selfcheck.php
I done the selfcheck in step 9: “There is a problem with the motor or motor drive. Request technical support. [code : D007]”
Dear all,
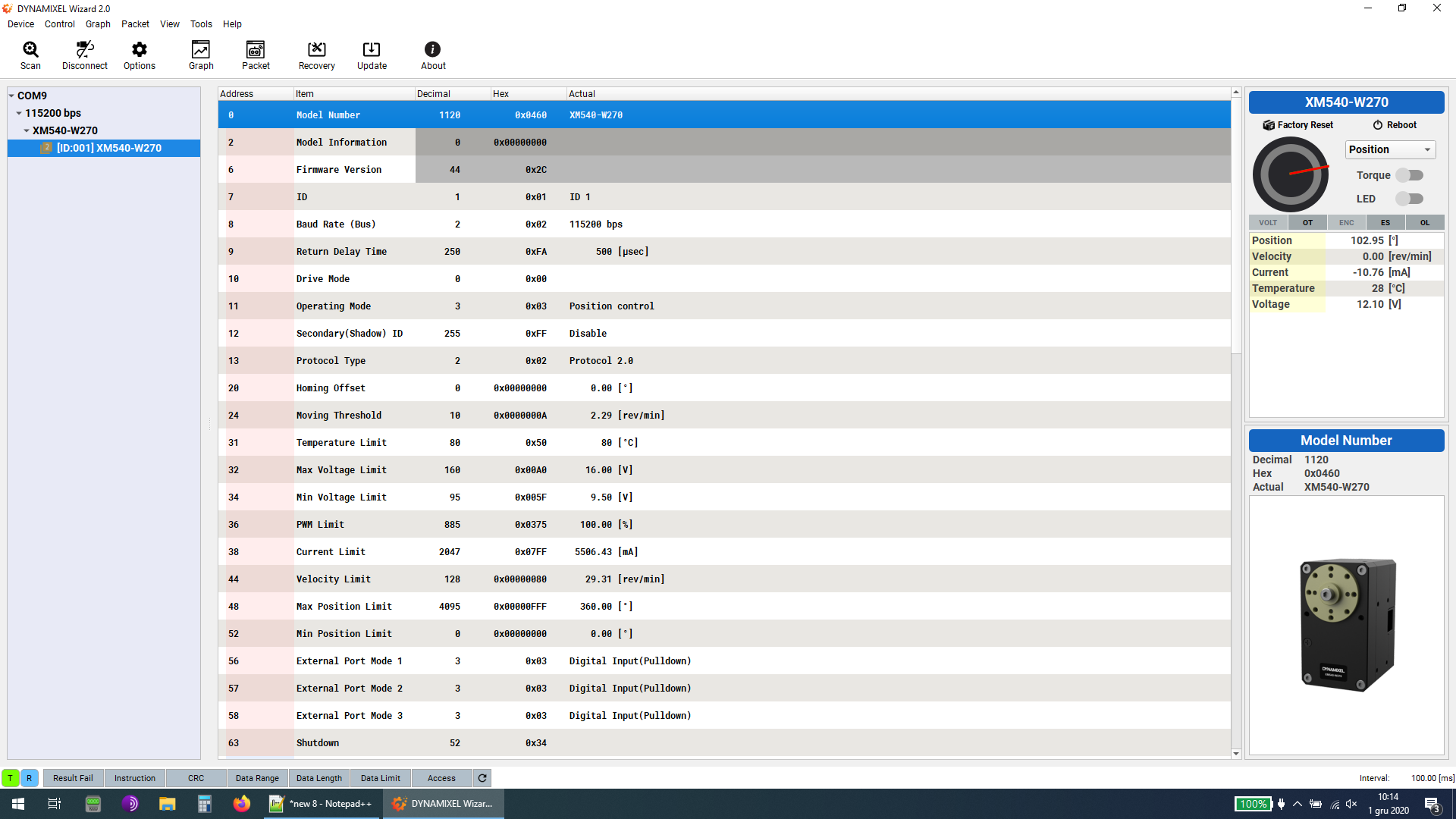
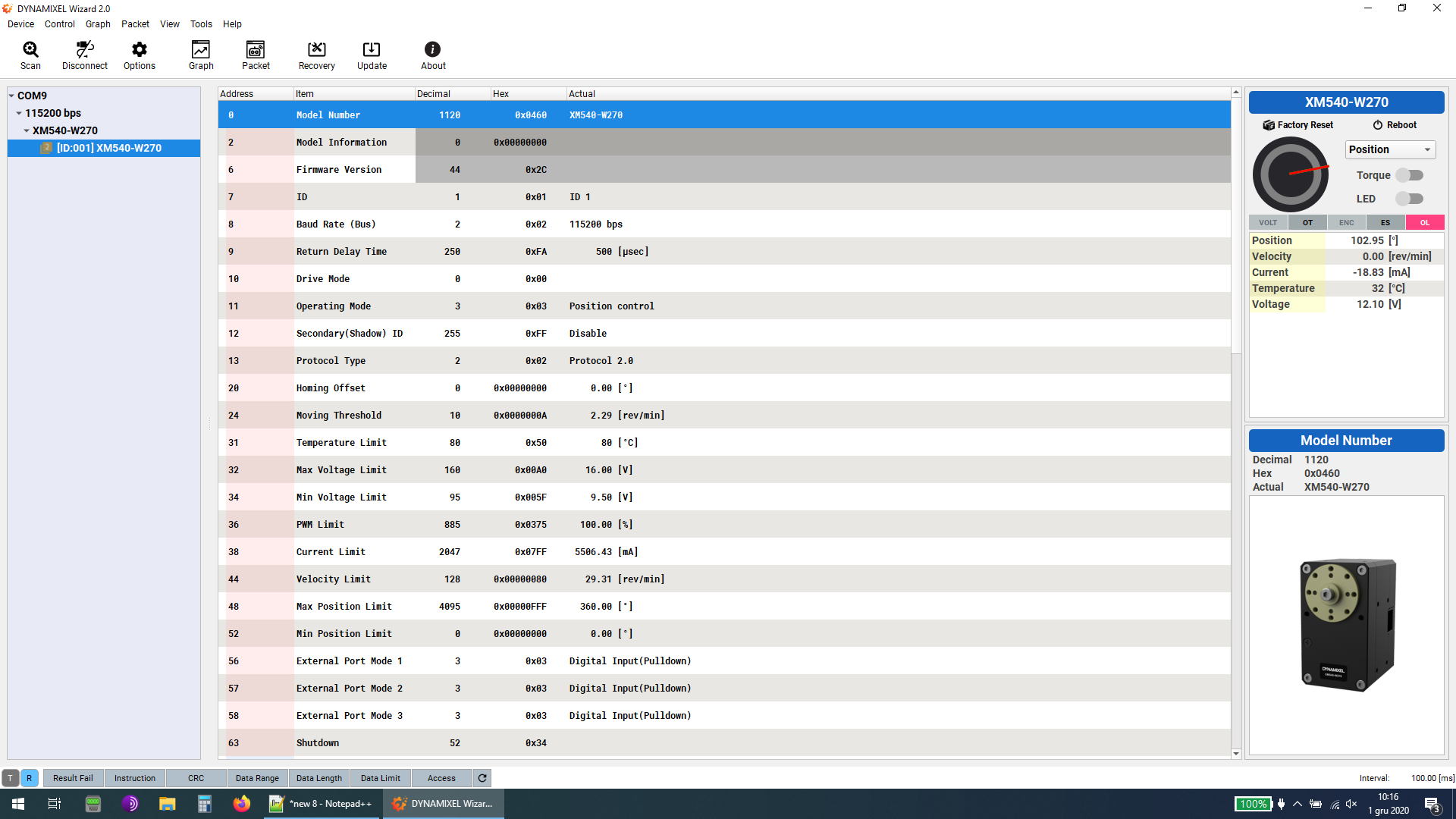
thanks for open a topic. Could you please send us a screenshot of your issue?
Thanks!
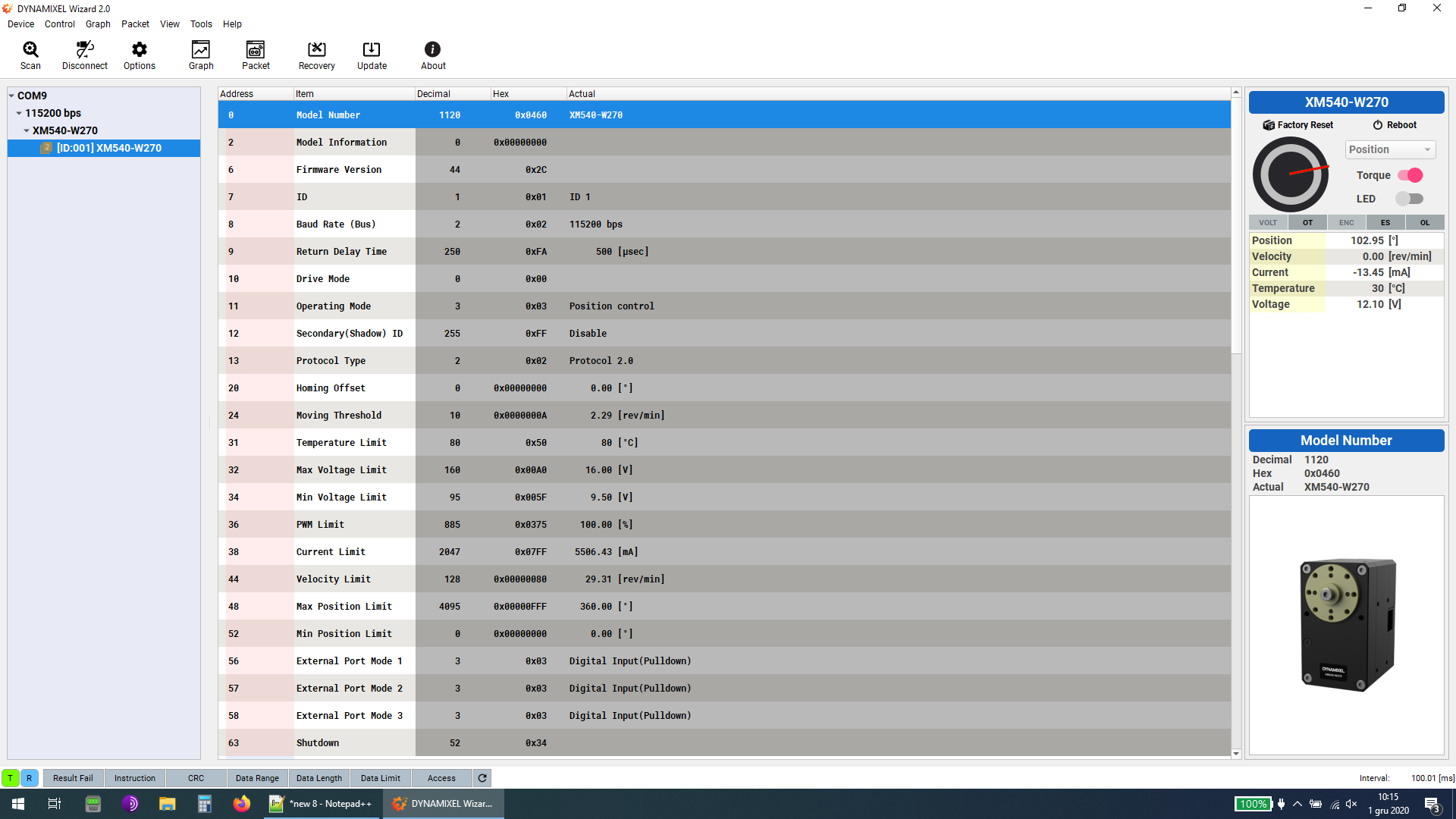
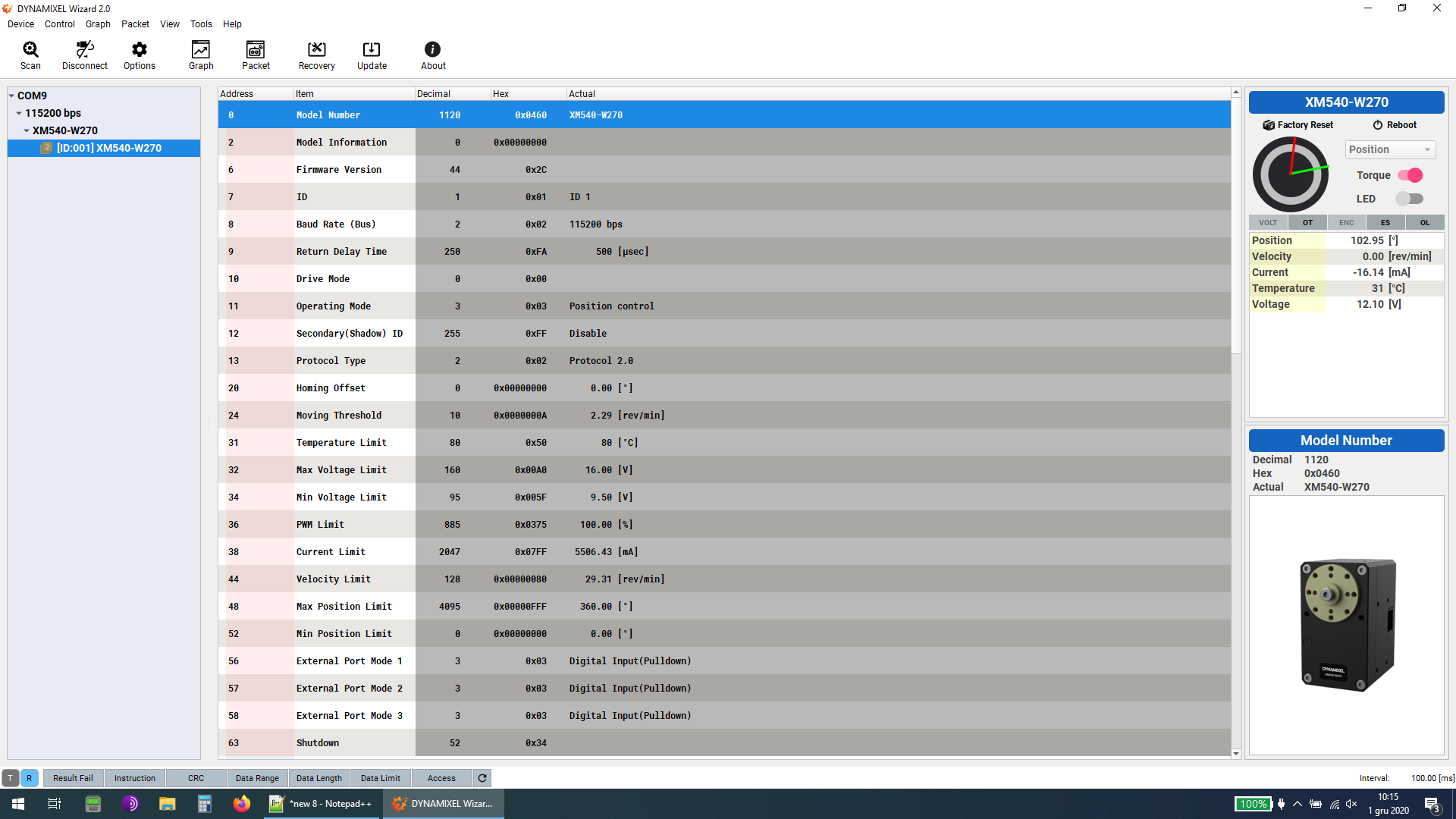
Screen 2 after turn on a torque, now servo resist to head in the opposite direction from the set position
Dear all,
opening the DYNAMIXEL is not supported…
We will request an Issue at the manufacturer and give you a reply asap.
Dear all,
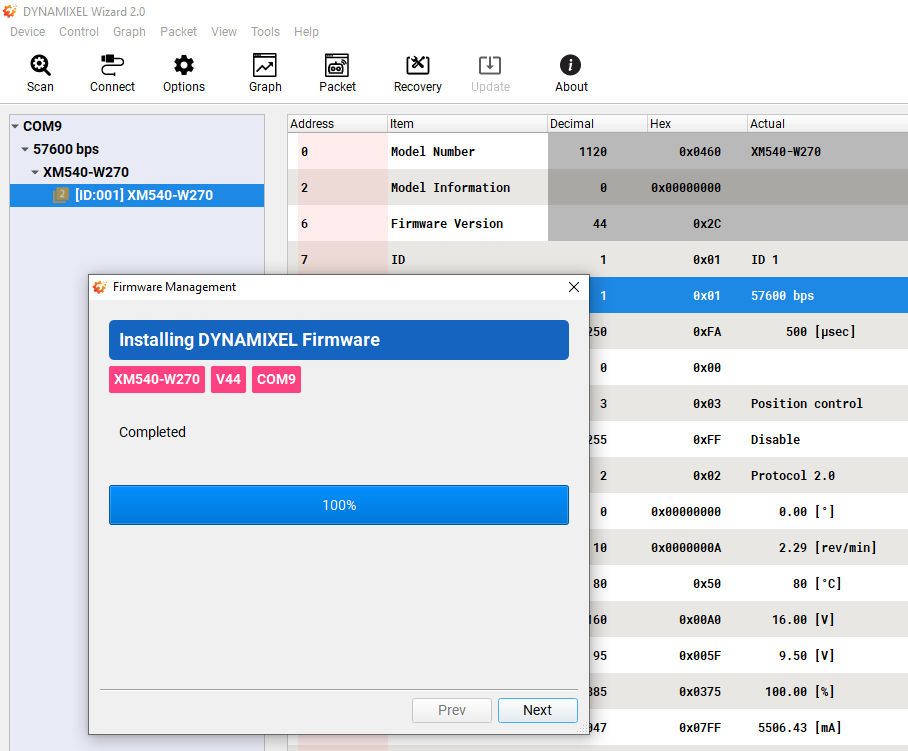
please try to do a Firmware recovery: DYNAMIXEL Wizard 2.0 (robotis.com)
Do you have an U2D2?
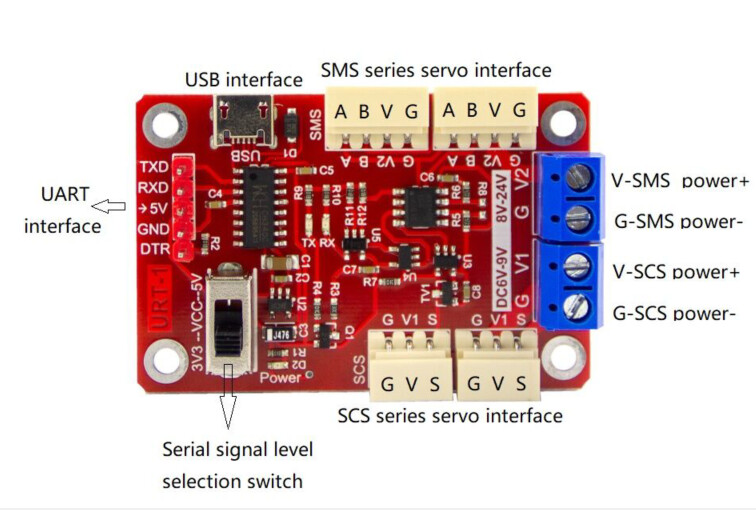
Dear, I done the recovery but it didn’t help. I don’t have U2D2, I’m using different converter that works correctly with other DYNAMIXEL servos.
Dear all, which converter are you using?
Dear all,
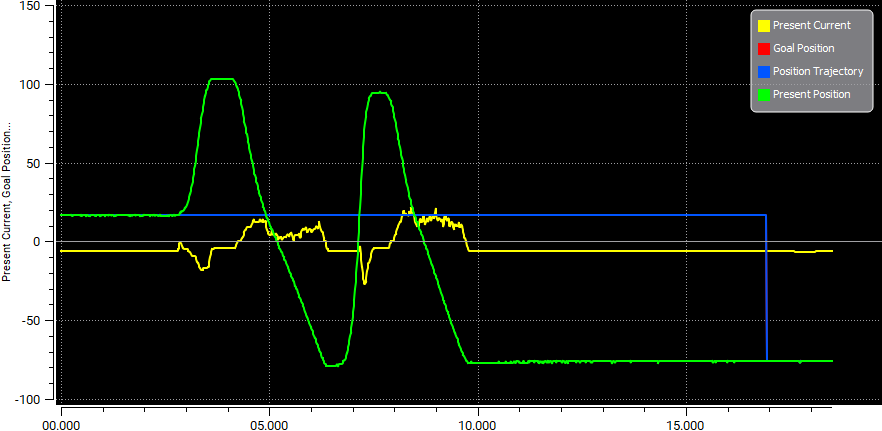
It is going to be great if I can see the status in Shutdown by plotting Present Current, Goal Position, Position Trajectory through a graph using the Graph feature in DYNAMIXEL Wizard 2.0.
Thanks in advance!
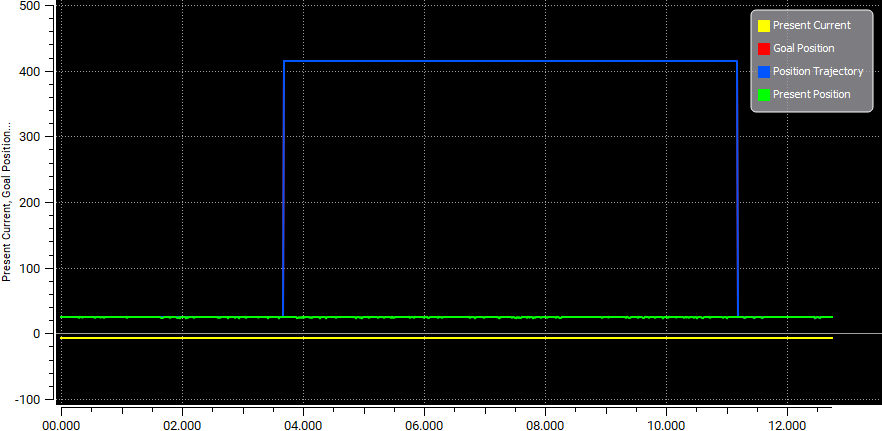
graph1
Goal Position and Position Trajectory graphs overlap each other
Torque is enabled
2.7sek set new goal position
10.2sek overload error and torque disables
graph2
Goal Position and Position Trajectory graphs overlap each other
Torque is enabled
2.8sek turning counterclockwise by hand
4.2sek turning clockwise by hand
7.1sek turning counterclockwise by hand again
9.8sek release and leave without interference
16.9sek overload error and torque disables
Amount of braking force increases when truning away from the goal position.
Dear all,
thanks for posting the graphs.
Could you please send us an email so we can tell you a RMA no. and the DYNAMIXEL can be send back for checking?
mateusz.maciejewski@spaceforest.pl