I’ve tried Windows 10, Mac OSX and Ubuntu 16.04 but I’m getting the same error when I try to upload to the DSC board using the USBasp programmer.
avrdude: error: program enable: target doesn’t answer. 1
avrdude: initialization failed, rc=-1
Double check connections and try again, or use -F to override
this check.
however it I’m still getting some errors. I’m forcing the write and also slowing down the speed, but even then I still get errors. I think there is something wrong with the device you sent me.
we are flashing on every DSC the bootloader and ROS Node, so a few checks to be sure everything was done correctly:
Do you’ve set the jumper to “POWER” on the USBasp?
Both jumpers on the DSC are set?
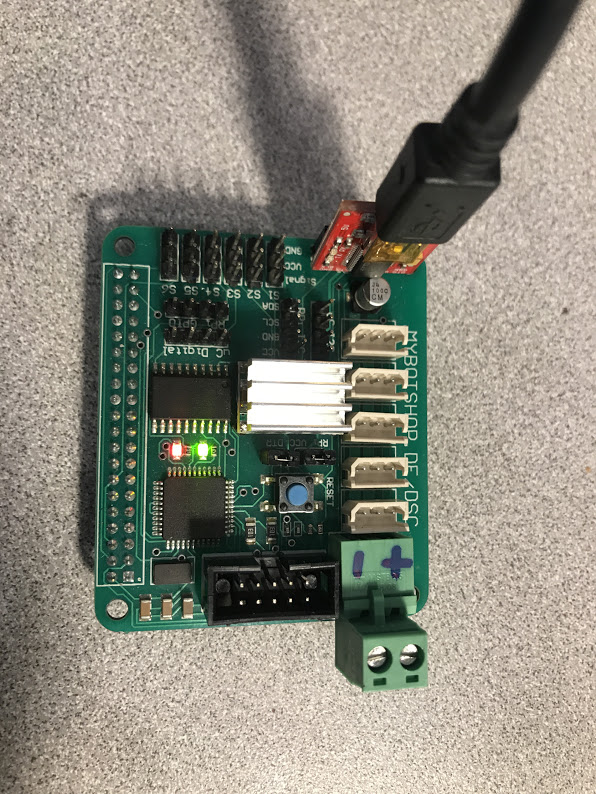
Is the Green LED shining and the red one flashing on the DSC?
Please set the second jumper to “SLOW” at the USBasp and burn the bootloader again to the DSC. - Open the Arduino IDE - Tools - Burn Bootloader
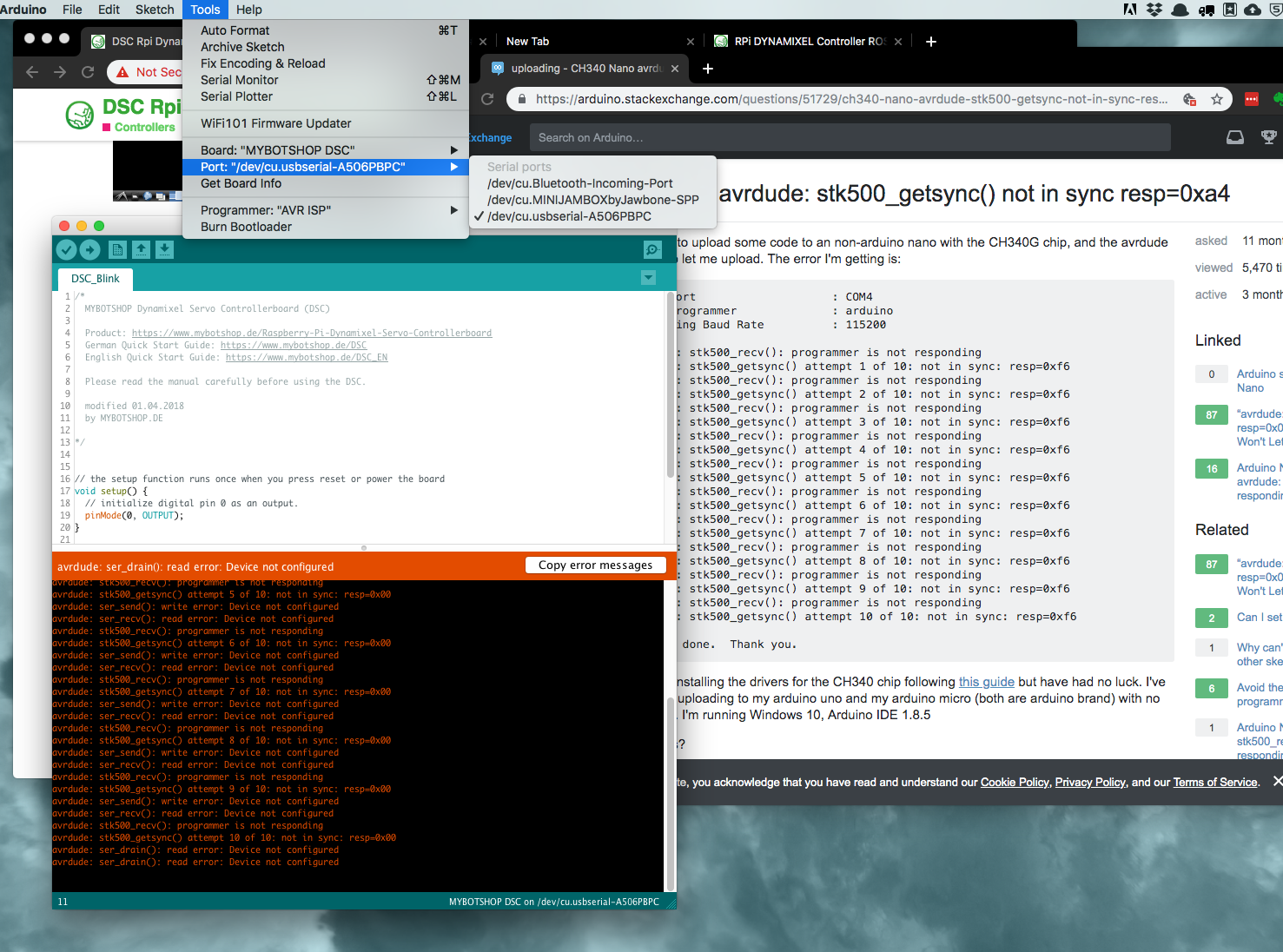
Could you please post a picture of your DSC and USBasp how they are connected and which LEDs are shining? Furthermore a screenshot of your Arduino IDE would be very helpful, e.g. which port is used, which board was chosen and so on.
I did not have the power jumper set. That is not in your instructions anywhere. You should add that! I couldn’t find any information about the USBasp on your website. Perhaps creating a page that is specific to the USBasp would be helpful?
There is an error in your english instructions for the ROS Node regarding installing the arduino IDE:
sudo apt-get install arduino arduino core
E: Unable to locatate package core
Well, here are better instructions for downloading the latest Arduino software for Ubuntu 16.04 running on Raspberry Pi 3 B+
Download Arduino IDE Linux Arm 32bit for Raspberry pi
Don’t use “sudo apt install arduino” because it will install arduino v1.0.5 which does not allow for custom hardware. (If you are installing on a desktop or laptop you will probably want to select the 64bit Arduino version. Also FWI I had issues with 1.8.9 on a dell laptop running Ubuntu 16.04 so I downloaded a previous build 1.6.13 of the Arduino IDE and that worked fine.)
wget https://www.arduino.cc/download_handler.php?f=/arduino-1.8.9-linuxarm.tar.xz
tar -xf arduino-1.8.9-linuxarm.tar.xz
sudo mv arduino-1.8.9 /opt
Download MyBotShop DSC Arduino files and install:
wget http://www.mybotshop.de/download/Arduino_DSC.zip
unzip Arduino_DSC.zip
cd libraries/
sudo mv DSCserial/ /opt/arduino-1.8.9/libraries/
cd ../hardware/
sudo mv DSC /opt/arduino-1.89/hardware/
Start Arduino IDE:
cd /opt/arduino-1.8.9 && ./arduino
You can try running the install script in the Arduino folder with the instructions below, however I have had limited success. Mostly this script just creates a desktop shortcut. But I had issues with it working.
in my opinion you have some driver problems, because the Green and Red LED is shining. That indicates that the previous code, which we’ve burned on the uC before shipped the DSC, is still on the board.
Please check your second post concerning catkin_make fail, I have an idea how to test something.
I don’t think it is the driver. I am getting the same error on Mac OSX, Ubuntu 16.04, and Windows 10 and on the RaspberryPi. that’s four different computer systems that are all unable to communicate with the board.
usually I would agree to your opinion but on the other hand you are not able to programm the DSC via USBasp adapter, too and the ISP Bus is working for sure because we are using it, too, to programm the bootloader and upload the ROS file.
ubuntu@ubiquityrobot:~$ rosrun rosserial_python serial_node.py /dev/ttyAMA0
[INFO] [1554317878.179003]: ROS Serial Python Node
[INFO] [1554317878.225621]: Connecting to /dev/ttyAMA0 at 57600 baud
[ERROR] [1554317895.340240]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1554317910.342652]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1554317925.345236]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1554317940.348141]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
Ok I went through and deleted all the DSC related files and then went through and recopied and rebuilt the Arduino libraries and now i was finally able to upload the DSC_ROS,ino sketch!
I also deleted a “Rosserial_Arduino_lirbary” folder that may have been installed by previous software. But it seemed like rebuilding the libraries again is what did it.
So there was something wrong with my first USBasp programmer, or I did something wrong using it… I don’t know.
thanks for the offer for the replacement , but I already purchased another USBasp and I don’t really need two. but thank you.
also i realized that for my project I want to use the dynamixel pros as well as some of the x-series. which means I need something that can do RS485.
But I have a handful of AX servos and also some x-series TTL servos so maybe i’ll use the DSC for another project later.
I should also reiterate that you should include some instructions for the USBasp on your site that explains the jumper pins, either as part of the DSC page or on a seperate page. that would have saved me a LOT of headache and confusion.