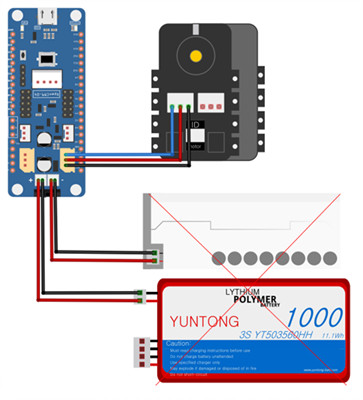
I connected XL430-W250-T directly to OpenCM9.04-A and added 11v power supply to the board.
The motor blinks red once on start.
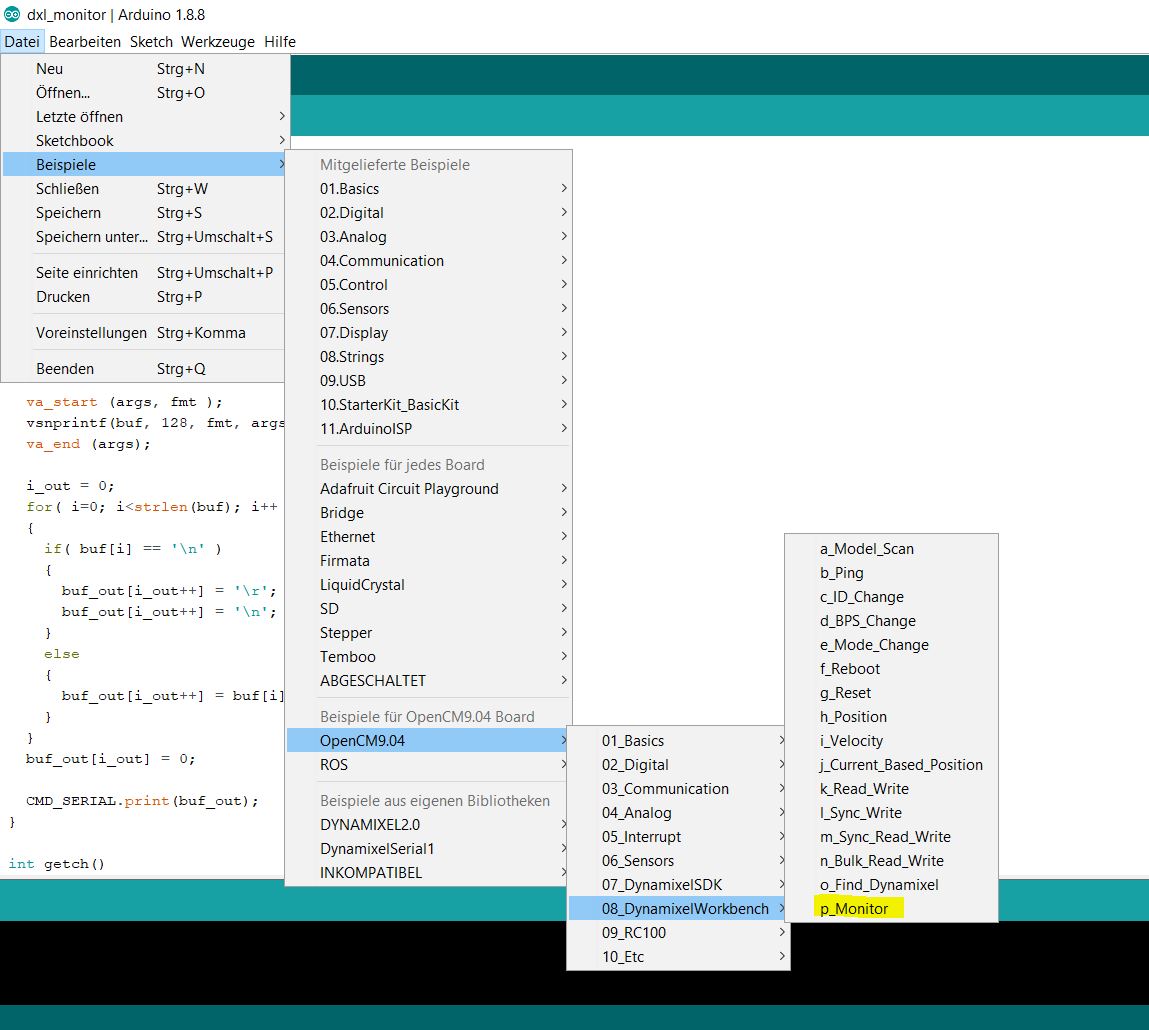
Following code makes green led blinking but no action from the motor.
What I did wrong?
// Print present current
delay(500);
DEBUG_SERIAL.print("Present Current(raw) : ");
DEBUG_SERIAL.println(dxl.getPresentCurrent(DXL_ID));
digitalWrite(LED_BUILTIN, HIGH); // set to as HIGH LED is turn-off
delay(500);
dxl.setGoalCurrent(DXL_ID, 3.0, UNIT_PERCENT);
dxl.setGoalPosition(DXL_ID, 0);
delay(500);
DEBUG_SERIAL.print("Present Current(ratio) : ");
DEBUG_SERIAL.println(dxl.getPresentCurrent(DXL_ID, UNIT_PERCENT));
digitalWrite(LED_BUILTIN, LOW); // set to as LOW LED is turn-on
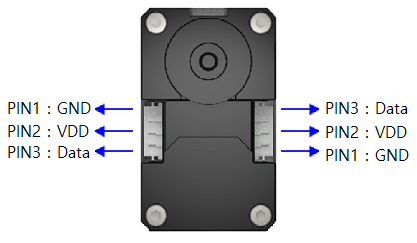
Slots in XL430-W250 are located differently (by 90 degrees) that in your diagram, but I checked both possible options of connection changing left and right wires (blue and black in your diagram). The result for both options is the same:
thanks for your reply. If the wiring is correct and the DYNAMIXEL is getting the correct voltage from the battery or power supply it can be just any issue with the code. Are you sure no short circuit happened and the OpenCM is fault? The STM controller on the top of the board is not getting warm while operation?
I’ve already sent the manufacturer an email they should share their opinion as well.
thank you for helping me. You can see the voltage and the current on the photo I’d sent.
Actually the board consuming about 50mA by itself from the 11v power supply and about 50mA more after connecting a motor. All the elements had normal temperature. I’d also measured that 11v is delivered to the motor with correct polarity regarding https://emanual.robotis.com/assets/images/dxl/x/x_series_ttl_pin.png


{kind=link}