Recently, I have a project about control motor with Python via Arduino.
And I successfully control the MIT mode of AK70-10 with Custom Python GUI.
Now, I’m planning to implement the “Gravity Compensation”.
I’m a new to this area, so can you guys give me an advice or suggestion?
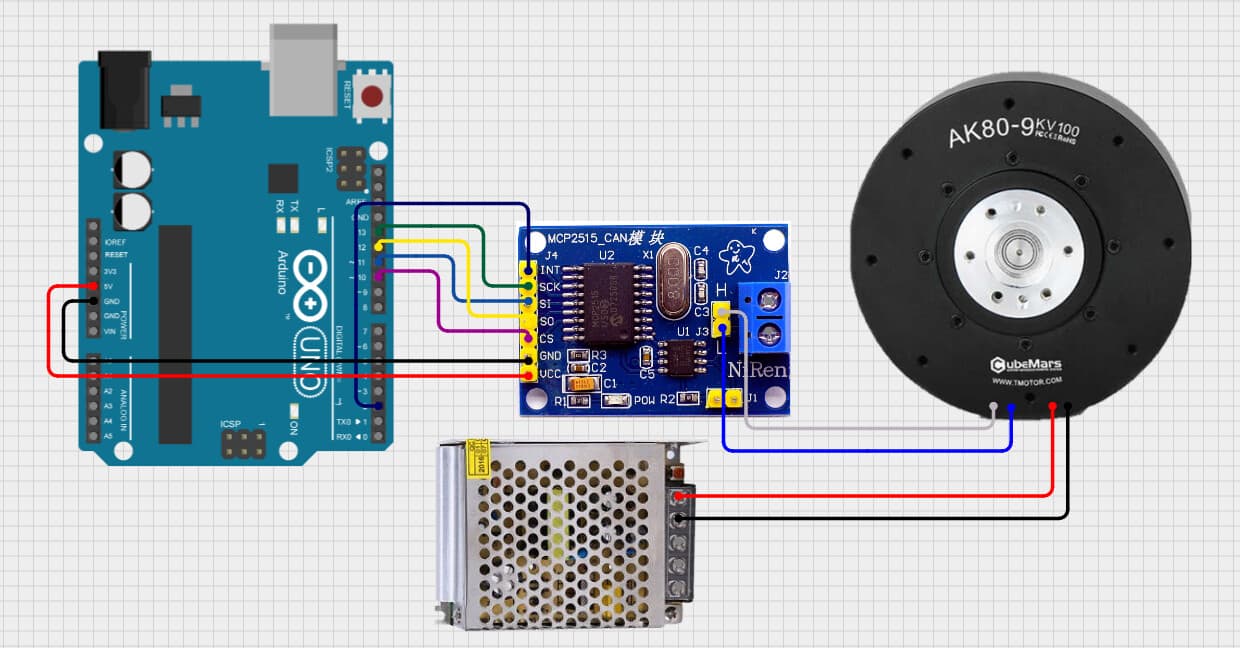
Below is the connection diagram of my system.
Difference is I’m using CAN Bus Shield rather than MCP2515 CAN Bus.