Hi Sohail,
The keep_program_alive folder was on the raspberry pi and it says 1.19.
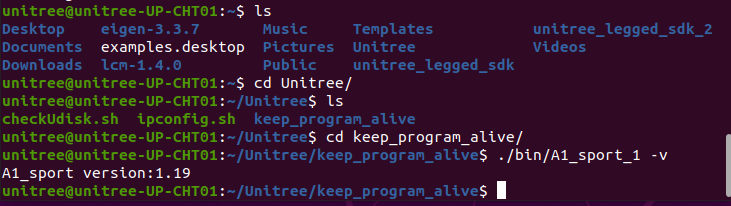
Does that mean it’s a configuration error and not a firmware problem?
Thank you and best regards

Hi Sohail,
The keep_program_alive folder was on the raspberry pi and it says 1.19.
Does that mean it’s a configuration error and not a firmware problem?
Thank you and best regards
Yea the software seems to be the correct version so it is a configuration issue.
What would be the best course of action now?
Do you perhaps have network configuration files that I can use?
Or maybe a guide how to correctly install/configure the newest SDK.
For now, I would suggest using the 3.2 SDK which is working, I will try and inquire with the manufacturers on the configuration issue for the 3.3.1 SDK.
The issue is most of the A1’s vary from batch to batch, not only in software but hardware as well, so narrowing down the issue is troublesome.
Thank you very much. Sorry for the trouble.
There are some cool features on the 3.3.1. For 3.2 we would have to program those ourselves.
Do you perhaps know how we could make the robot squad (sit down on his hind legs) with the sdk?
Making the robot do such stuff requires low-level control of the joints.
But that is only possible in “normal mode” as far as I know.
Therefore you’d have to implement everything from scratch.
I am not aware of a possibility to add features to the sport controller, but maybe I’m wrong
@nvmten with the current level of ROS A1 support its not possible but it is possible to squad the robot using 3.3.4 in unitree_legged_sdk we are planning to update A1 driver to 3.3.4. Please send an email to support@mybotshop.de to get the updated version by next week.
@jgrube it is possible to change the robot mode in A1 by changing the ip address at initialization time of sdk.
Amazing! Thank you, everyone!