On Nvidia (192.168.123.12) these are the open connections:
Active Internet connections (w/o servers)
Proto Recv-Q Send-Q Local Address Foreign Address State
tcp 0 200 nx:ssh 192.168.123.153:60719 ESTABLISHED
udp 213248 0 nx:8090 192.168.123.161:8082 ESTABLISHED
udp 0 0 localhost:57397 localhost:domain ESTABLISHED
These are the open connections when i netstat the raspberry pi (192.168.123.161):
Proto Recv-Q Send-Q Local Address Foreign Address State
tcp 0 36 192.168.123.161:ssh 192.168.123.153:60765 ESTABLISHED
udp 0 0 192.168.123.161:8008 192.168.123.10:8007 ESTABLISHED
udp 1536 0 192.168.123.161:8009 192.168.123.10:8007 ESTABLISHED
I tried to use the sdk on the robot without VM and it has the same problem.
My guess is that the IP and port is configured wrong? My nvidia board and raspberry pi have different static IP’s than the ones in the docs (they are reversed compared to those on docs.quadruped.de). If the unitree_legged_sdk works with standard IP’s, maybe it malfunctions due to this?
Exactly, though the script should have already built it in the catkin_ws/utils/lcm-1.4.0/build. Please check if the example_wirelessHandle.cpp is working? Also can you tell the method of how you are connecting to the robot? is it via WiFi or LAN?
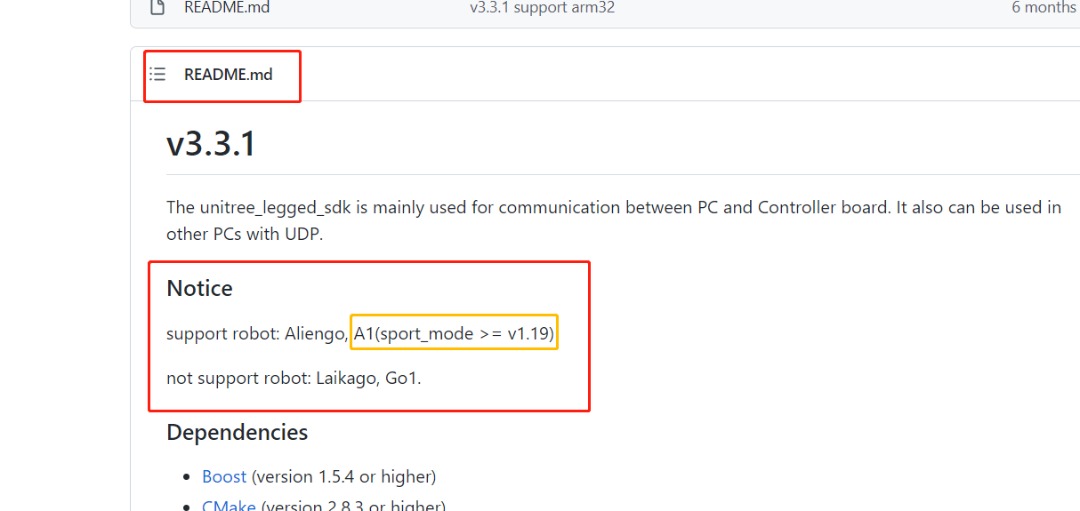
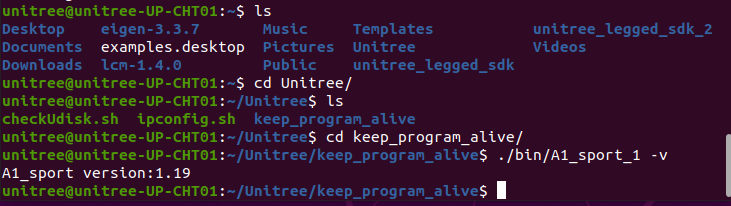
Also please connect to the A1 using your mobile phone and check the firmware version of the A1.
In lib/udp.h change the port according to the ones that are open for udp and build the build the folder as instructed in the readme.md of the unitree_legged_sdk
It worked! I rebuilt the lcm in the catkin_ws/utils/ folder. However, it only works when I run the example_walk file inside the unitree_legged_sdk-3.2.0 folder.
Is there any way I can make it work with the sdk 3.3.1? I copied the 3.3.1 version into the catkin_ws/utils directory and tried to run it but it gave me the ip&port error.
So I compared the working 3.2 version with the 3.3.1 version and here is what I found:
udp.h file is identical
example_walk.cpp is not the same. In the connection section, the 3.2.0 example_walk.cpp file (which works) has this:
Great to hear that, I believe that v3.2 works with specific firmware of the A1. v3.3.1 requires a different perhaps an updated firmware but I will to confirm that and get back to you!
What would be the best course of action now?
Do you perhaps have network configuration files that I can use?
Or maybe a guide how to correctly install/configure the newest SDK.
For now, I would suggest using the 3.2 SDK which is working, I will try and inquire with the manufacturers on the configuration issue for the 3.3.1 SDK.
@nvmten with the current level of ROS A1 support its not possible but it is possible to squad the robot using 3.3.4 in unitree_legged_sdk we are planning to update A1 driver to 3.3.4. Please send an email to support@mybotshop.de to get the updated version by next week.
@jgrube it is possible to change the robot mode in A1 by changing the ip address at initialization time of sdk.