Unfortunately this didn’t work. These are the steps i did:
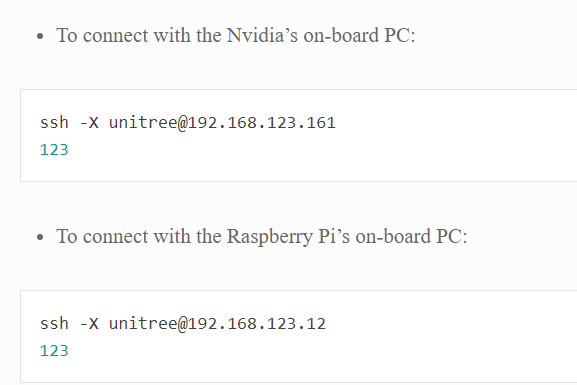
- Start robot, connect to wifi and SSH into nvidia board
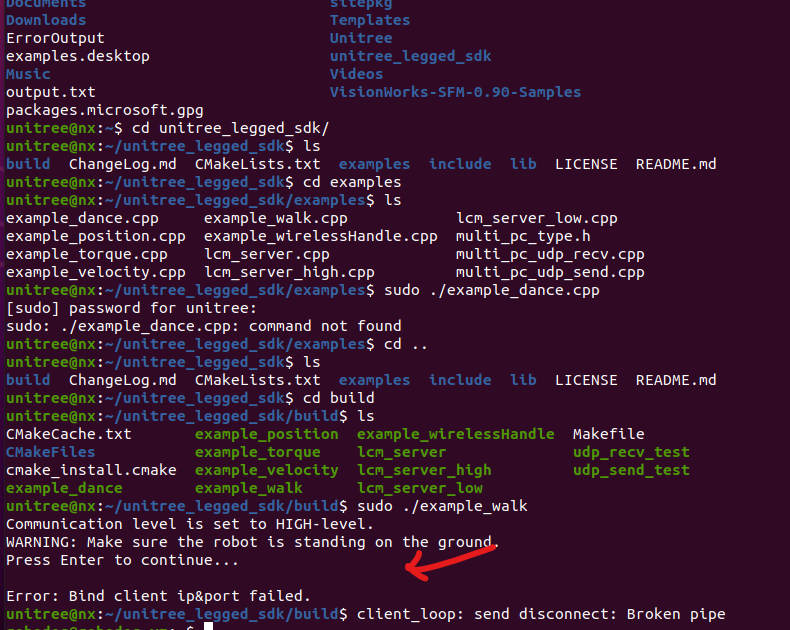
- cd into unitree_legged_sdk
- sudo su
- ./example_walk
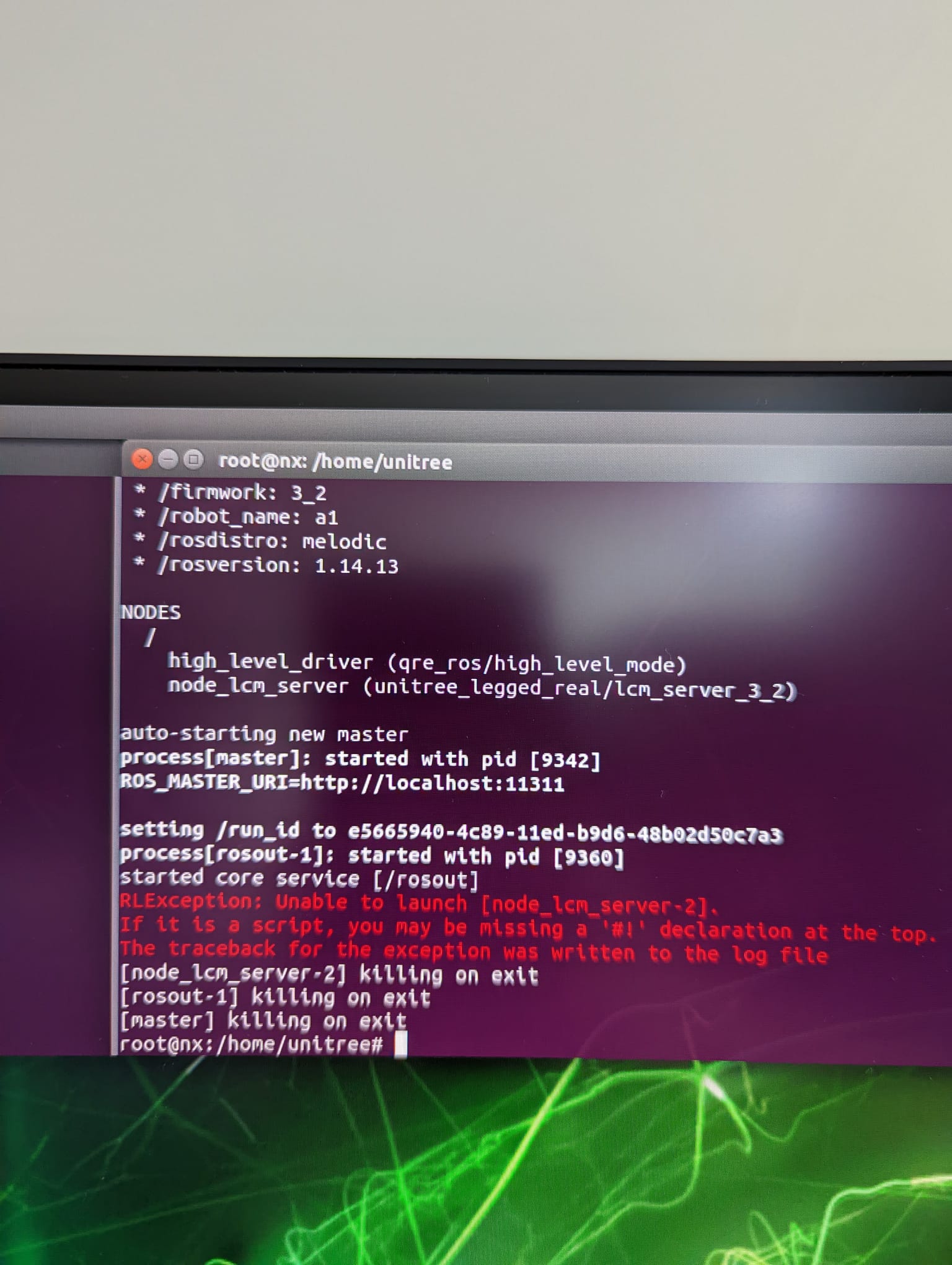
Here is the error message:

I checked the file and my first thought was that maybe the IP in there is not correct? I tried changing it from 161 to 12 in the example_walk.cpp file and remake the build folder. This however did not work either and i resetted it again to 161.
This is the example walk file:
class Custom
{
public:
// Custom(uint8_t level): safe(LeggedType::A1), udp(8090, “192.168.123.11”, 8082, sizeof(HighCmd), sizeof(HighState)){
Custom(uint8_t level): safe(LeggedType::A1), udp(8090, “192.168.123.161”, 8082, sizeof(HighCmd), sizeof(HighState)){
udp.InitCmdData(cmd);
udp.SetDisconnectTime(dt, 1);
// udp.SetDisconnectTime(0, 0);
}
void UDPRecv();
void UDPSend();
void RobotControl();
Safety safe;
UDP udp;
HighCmd cmd = {0};
HighState state = {0};
int motiontime = 0;
float dt = 0.002; // 0.001~0.01
};
void Custom::UDPRecv()
{
udp.Recv();
}
void Custom::UDPSend()
{
udp.Send();
}
void Custom::RobotControl()
{
motiontime += 2;
udp.GetRecv(state);
// printf("%f %f %f %f %f\n", state.imu.rpy[1], state.imu.rpy[2], state.position[0], state.position[1], state.velocity[0]);
cmd.mode = 0;
cmd.gaitType = 0;
cmd.speedLevel = 0;
cmd.footRaiseHeight = 0;
cmd.bodyHeight = 0;
cmd.euler[0] = 0;
cmd.euler[1] = 0;
cmd.euler[2] = 0;
cmd.velocity[0] = 0.0f;
cmd.velocity[1] = 0.0f;
cmd.yawSpeed = 0.0f;
if(motiontime > 0 && motiontime < 1000){
cmd.mode = 1;
cmd.euler[0] = -0.3;
}
if(motiontime > 1000 && motiontime < 2000){
cmd.mode = 1;
cmd.euler[0] = 0.3;
}
if(motiontime > 2000 && motiontime < 3000){
cmd.mode = 1;
cmd.euler[1] = -0.2;
}
if(motiontime > 3000 && motiontime < 4000){
cmd.mode = 1;
cmd.euler[1] = 0.2;
}
if(motiontime > 4000 && motiontime < 5000){
cmd.mode = 1;
cmd.euler[2] = -0.2;
}
if(motiontime > 5000 && motiontime < 6000){
cmd.mode = 1;
cmd.euler[2] = 0.2;
}
if(motiontime > 6000 && motiontime < 7000){
cmd.mode = 1;
cmd.bodyHeight = -0.2;
}
if(motiontime > 7000 && motiontime < 8000){
cmd.mode = 1;
cmd.bodyHeight = 0.1;
}
if(motiontime > 8000 && motiontime < 9000){
cmd.mode = 1;
cmd.bodyHeight = 0.0;
}
if(motiontime > 9000 && motiontime < 11000){
cmd.mode = 5;
}
if(motiontime > 11000 && motiontime < 13000){
cmd.mode = 6;
}
if(motiontime > 13000 && motiontime < 14000){
cmd.mode = 0;
}
if(motiontime > 14000 && motiontime < 18000){
cmd.mode = 2;
cmd.gaitType = 2;
cmd.velocity[0] = 0.4f; // -1 ~ +1
cmd.yawSpeed = 2;
cmd.footRaiseHeight = 0.1;
// printf("walk\n");
}
if(motiontime > 18000 && motiontime < 20000){
cmd.mode = 0;
cmd.velocity[0] = 0;
}
if(motiontime > 20000 && motiontime < 24000){
cmd.mode = 2;
cmd.gaitType = 1;
cmd.velocity[0] = 0.2f; // -1 ~ +1
cmd.bodyHeight = 0.1;
// printf("walk\n");
}
if(motiontime>24000 ){
cmd.mode = 1;
}
udp.SetSend(cmd);
}
int main(void)
{
std::cout << “Communication level is set to HIGH-level.” << std::endl
<< “WARNING: Make sure the robot is standing on the ground.” << std::endl
<< “Press Enter to continue…” << std::endl;
std::cin.ignore();
Custom custom(HIGHLEVEL);
// InitEnvironment();
LoopFunc loop_control("control_loop", custom.dt, boost::bind(&Custom::RobotControl, &custom));
LoopFunc loop_udpSend("udp_send", custom.dt, 3, boost::bind(&Custom::UDPSend, &custom));
LoopFunc loop_udpRecv("udp_recv", custom.dt, 3, boost::bind(&Custom::UDPRecv, &custom));
loop_udpSend.start();
loop_udpRecv.start();
loop_control.start();
while(1){
sleep(10);
};
return 0;
}