Which GPS are you referring to? Typically the GPS has to be configured. The ZED2 meshes can be found here. You just have to rename them according to the file name in the URDF.
PointCloud to laserscan is not working properly or I can’t get it configured for the ouster. Do you also use PointCloud to laserscan? Do you have a launch file for the ouster?
Normally /ouster/Scan should work, unfortunately I didn’t find any configurations for it…
GPS I would like to use the integrated, but it takes a while until I can configure that.
@Sohail
thanks a lot for all these information. I’ll test the code in a few hours.
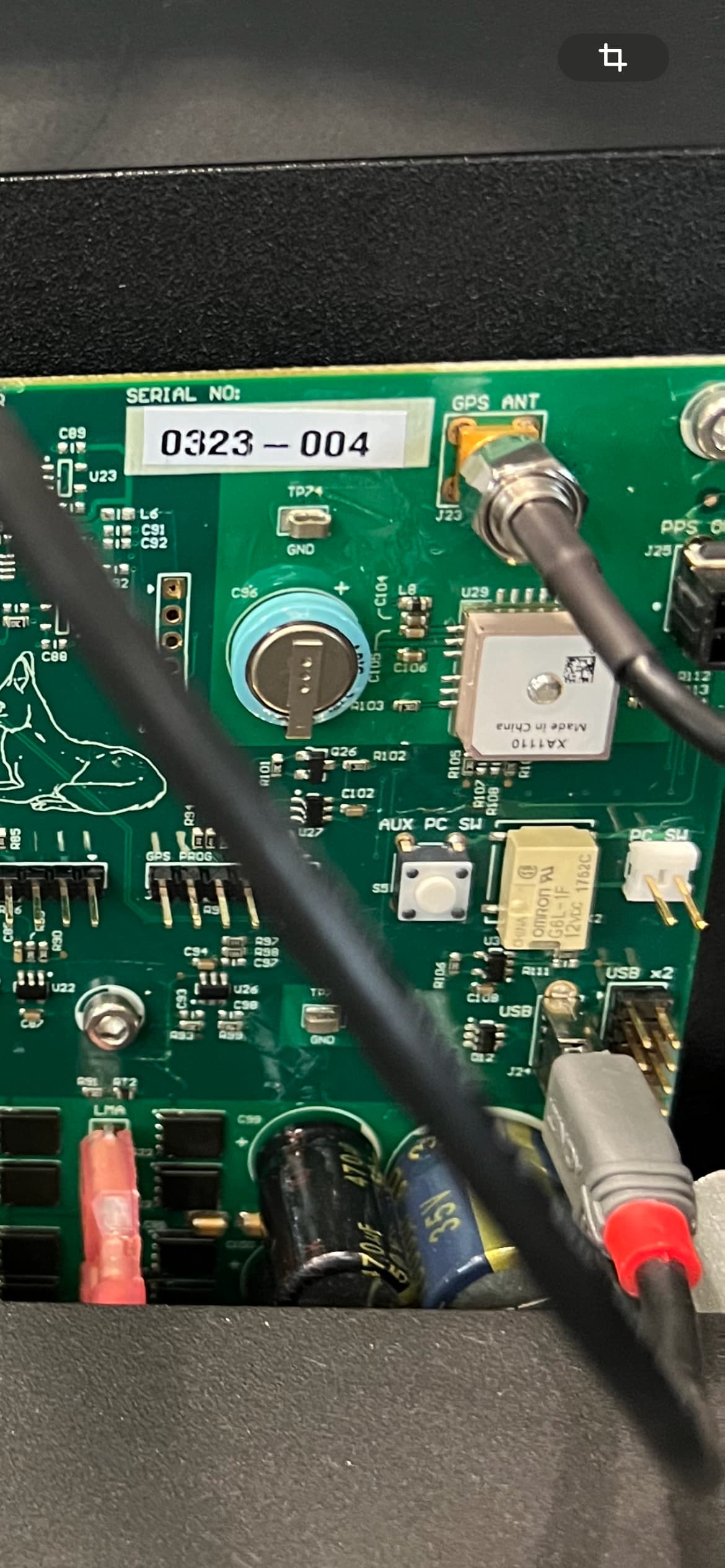
Next an hopefully last question, before I have a working system. How do I integrate and configure the GPS? I give u two pictures of my onboard GPS, I don’t know which GPS was shipped by my robot… Can u help me with this?
The GPS, if already included in the launch file, should run and would be coming in the topic of /navsat/fix. However, I just checked the Jackal Github (lines 162-181) and it seems that they are waiting for the nmea_navsat_driver to be ported to Humble due to which now it is disabled.
I tried to use the launch file u posted earlier and I do get some laserscan points. But I think laserscan does not work correctly because there are much less points compared to pointcloud.
I also tried to modify the launch file for pointcloud to laserscan but I didn’t work either.
If u have any idea to get this thing work I would love to hear.
I also opened an issue on the official ouster driver page
Do u have a running jackal with ros2 and ouster? Maybe u can send me an iso file?
Currently, we do not have a iso file ROS2 Humble port for Jackal.
Or may be it is possible to do a guided installation to make sure everything works correctly.
Or to do an upgrade from ros1 to ros2
For now Clearpath has not yet (probably within the future) ported completely to ROS2 Humble, so I would advise in terms of safety, reliability, and dependability is to stick to their main distribution. A ROS1 Noetic to ROS2 Foxy guide is already available for Jackal with complete instructions in the Clearpath Manual.
As for Ouster, the ouster repository has to be built as mentioned in their Github. Additionally, once its built you can use one of our tested ROS2 package to launch the driver (including the additions done last time).
I would suggest using the port that you have already done and posting the error/launch/config files of the point_cloud_to_laserscan, so that I can suggest the changes to resolve the issue.
@Sohail
I mean a iso for ros2 foxy jackal with ouster.
It is really important for me, that I have a running jackal with ros2 foxy or humble. But as u said that humble is currently not available, foxy is fine.
I don’t have any other idea, why laserscan is not working and there is. It error message
Do u sell the jackal with ros2 and 3d Slam preinstalled or just ros1?
I don’t have any other idea, why laserscan is not working and there is. It error message
Please post the error.
Do u sell the jackal with ros2 and 3d Slam preinstalled or just ros1?
Most of the Jackals that have been sold are usually ROS1. For ROS2, as mentioned we are waiting for a stable fully functional release.
It is really important for me, that I have a running jackal with ros2 foxy or humble. But as u said that humble is currently not available, foxy is fine.
I believe your current setup is working, so we can aid in resolving the remaining issues as the iso files that are available would work only for the Jackal and not the combined Ouster + 3D SLAM packages. We would have to build and test that setup to ensure it works correctly.
we have used the GTX 1650TI in the past with GDDR6 - This is fitting very well and is not producing so much heat. Please just take note, you have to add a different PSU & Wiring harness in your Jackal.
With a different customer we are still trying to implement PNY A2000 Low Profile GPU - But not sure about the performance and heat inside the robot yet.
because the GPU is taking so much power which can’t be delivered with the present components. If you would insert the GPU in your present setup, the PC will restart and restart, once the GPU is used, because the needed power can’t be provided.
We don’t have these components in our shop for selling because some of them are hand-made and made on order.
If you wanna upgrade your robot, I would recommend shipping to us.