We are looking for guidance on integrating our LiDAR sensor (Ouster OS1-32-U) with the Husky A200 platform, which is already running ROS2 Humble.
So far, we have successfully installed ROS2 on the A200 platform and integrated our IMU sensor into the robot.yaml file. The IMU integration was straightforward since it is one of the sensors officially supported by Clearpath. However, the Ouster LiDAR is not directly supported, and we are facing some challenges with its integration.
We have installed the driver from GitHub and can launch the sensor.launch file successfully. The issue arises when trying to add Ouster to the robot.yaml file.
We have already attempted using the extras section, but after installing the systemd services (which launch the platform and sensor launch files as background processes), we are unable to see any topics related to Ouster. Additionally, the list of topics gets reduced to only the IMU-related topics, and all platform-related topics (Husky) disappear.
Any advice on how to properly integrate the Ouster LiDAR into the robot.yaml file?
I’m having trouble following the posts you’re referring to, so I’d like to describe our issue and share the current status of our OUSTER O1-32 integration. I’ve attached our robot.yaml file along with some screenshots for reference.
When we leave six lines after the extras section in robot.yaml, no Husky-related processes start in the background. We confirmed this by checking the topic list.
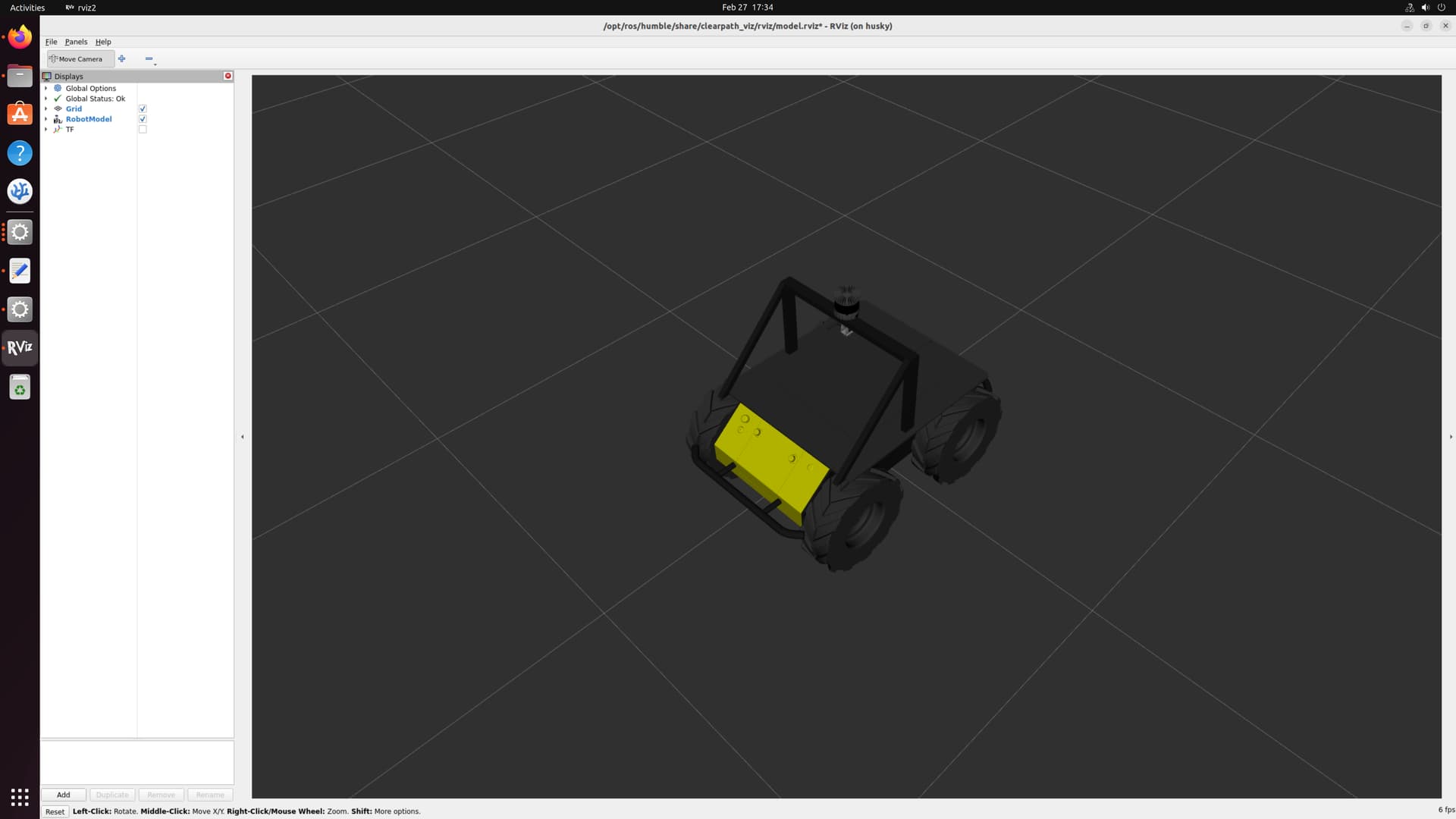
Our Ouster sensor appears in RViz using the live configuration (ros2 launch clearpath_viz view_model.launch.py setup_path:=/etc/clearpath/), which suggests that the URDF lines are correct.
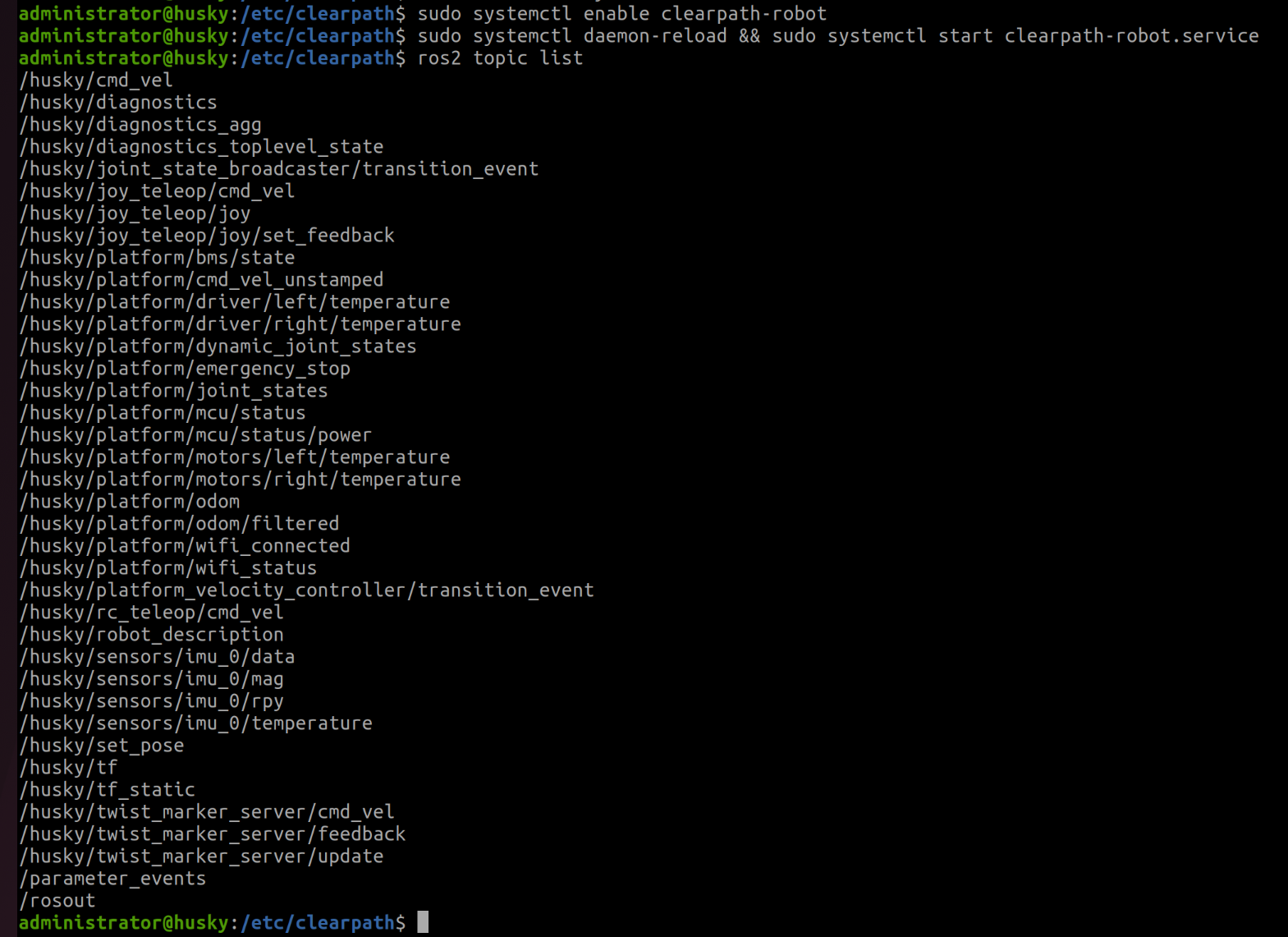
If we remove all lines in the extras section, the processes start as expected, and we can see an extensive list of topics (see attached file).
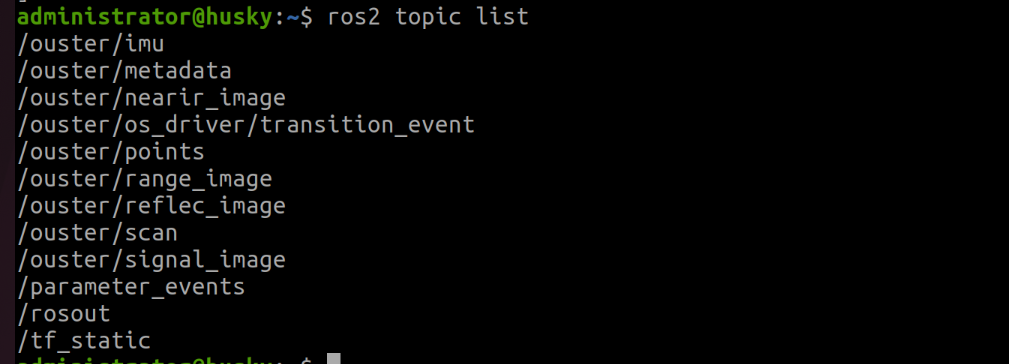
We can also start the Ouster launch file separately (ros2 launch ouster-ros driver.launch.py), and in this case, we see a list of topics related to Ouster (see attached file).
Do you have any suggestions on what we should check at this point?
Looking forward to your insights!